‹›Geometria básicaRotações de cabeceio, balanceio e empinamento
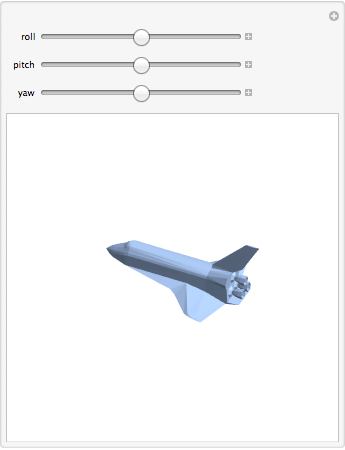
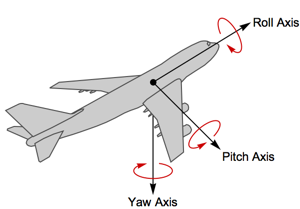
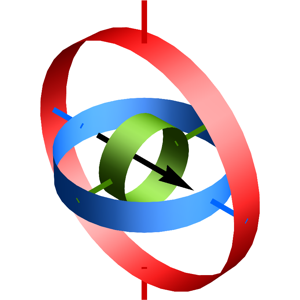
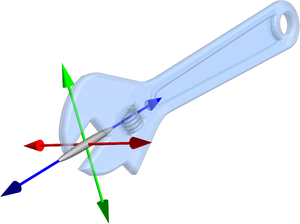
A versão 11 introduz RollPitchYawMatrix para descrever uma sequência de rotações em relação a um quadro fixo de coordenadas. Ele é frequentemente usado para modelar rotações de corpos rígidos em robótica e aeroespacial.
mostre o input completo da Wolfram Language
iShow[trans_] :=
Show[trans, Method -> {"ShrinkWrap" -> False}, PlotRange -> 8,
ImageSize -> {300, 300}];
plane = ExampleData[{"Geometry3D", "SpaceShuttle"}, "Region"];
Manipulate[
iShow[TransformedRegion[plane,
AffineTransform@RollPitchYawMatrix[{r, p, y}, {1, 2, 3}]]], {{r, 0,
"roll"}, -Pi, Pi, Pi/32}, {{p, 0, "pitch"}, -Pi, Pi,
Pi/32}, {{y, 0, "yaw"}, -Pi, Pi, Pi/32}, SaveDefinitions -> True]