射影変換を求めるキーポイント
バージョン12では,関心のある点を検出したり追跡したりするのに使うことができるImageKeypointsに新しいタイプのキーポイントが多数加わった.ORBキーポイント記述子は計算が非常に速く,回転不変性があるため,対応する点から変換行列を計算するのに向いている.
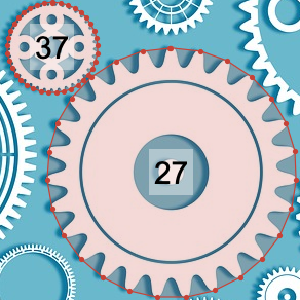
ImageCorrespondingPointsを使って対応する点を計算してみる.
次に幾何学変換行列を計算する.
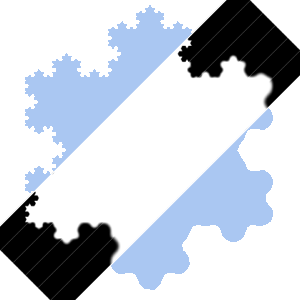
始めの画像の2つの弧の形である.
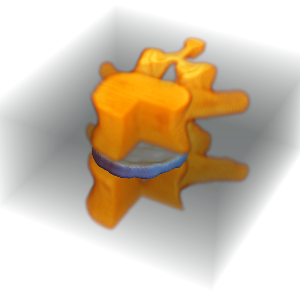
推測された変換列を使うと,2つ目の画像で変換された弧の領域を見付けることができる.