Hybrid Dynamical Systems
| In[2]:= |  X |
| In[5]:= |  X |
Each time the solution crosses the negative  axis, reflect it across the
axis, reflect it across the  axis.
axis.
| In[1]:= |  X |
| Out[2]= | 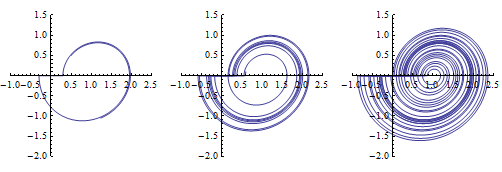 |
Compare the solutions for several different values of  .
.
| In[3]:= |  X |
| In[4]:= | X |
| Out[5]= | 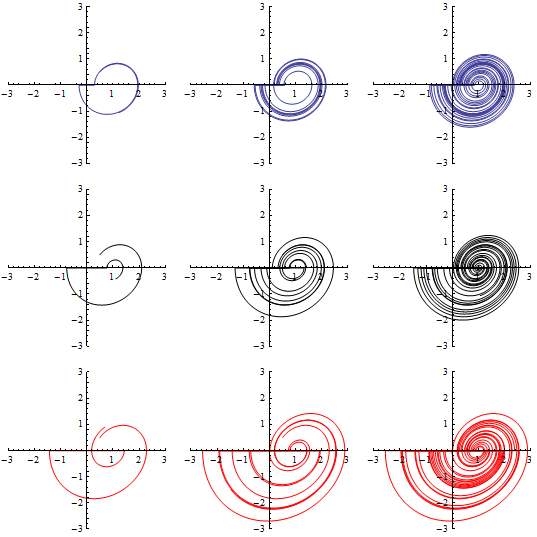 |