Design a Derivative-Filtered Aircraft Attitude Controller
Random sensor noise may get amplified around a control loop, causing high-frequency "chatter" in the control signal. Minimize the resulting actuator wear with a derivative-filtered controller for an aircraft attitude control system.
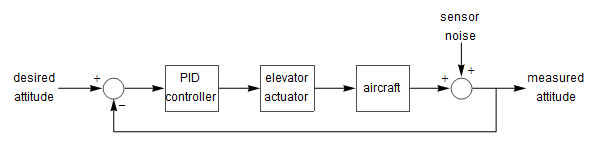 |
The elevator actuator and aircraft models.
| In[1]:= | 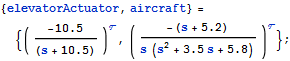 X |
| In[2]:= | X |
The PID controller.
| In[3]:= | X |
The ramp reference-following control action in the presence of sensor noise.
| In[4]:= | X |
| In[5]:= | 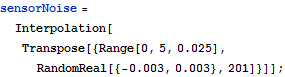 X |
| In[6]:= |  X |
| In[7]:= | X |
| Out[7]= | 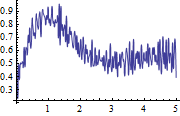 |
A derivative-filtered PID controller provides smoother control.
| In[8]:= | X |
| In[9]:= |  X |
| In[10]:= | X |
| Out[10]= | 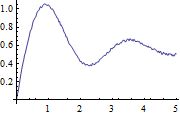 |