Design a Smith Predictor for a Tank Reactor
An isothermal continuous stirred-tank reactor (CSTR) can be modeled by a first-order-plus-time-delay system.
| In[1]:= | X |
Designing a PI controller with the delay set to zero results in an unstable closed-loop system.
| In[2]:= |  X |
| Out[2]= |
| In[3]:= |  X |
| Out[3]= | 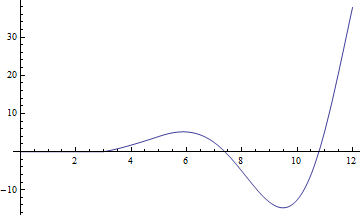 |
Use SmithDelayCompensator to create a stabilizing controller for the time-delay system.
| In[4]:= |  X |
| Out[4]= |
| In[5]:= |  X |
| Out[5]= |  |