Hydraulic System
Model the change in height of water in three tanks, with the third tank leaking.
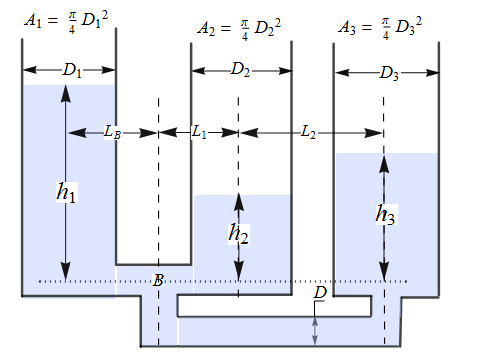 |
Flow rates depend on pressure differences and geometry.
| In[1]:= |  X |
Create a descriptor StateSpaceModel from the DAEs.
| In[2]:= | 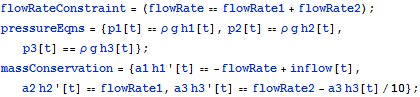 X |
| In[3]:= |  X |
| In[4]:= | 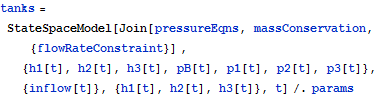 X |
| Out[4]= | 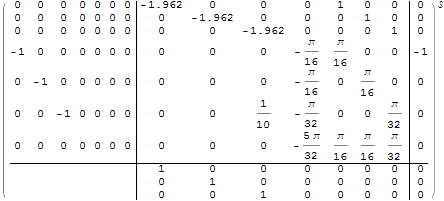 |
The tanks take over a minute to settle from a nonzero initial condition.
| In[5]:= | X |
| Out[5]= | 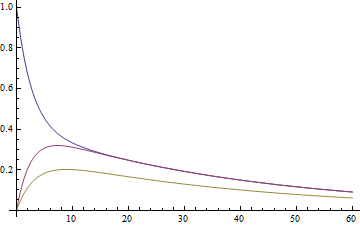 |
Find optimal state feedback gains based on cost matrices for the states and inputs. The resulting closed-loop system settles much faster.
| In[6]:= | 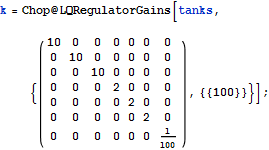 X |
| In[7]:= | X |
| In[8]:= |  X |
| Out[8]= | 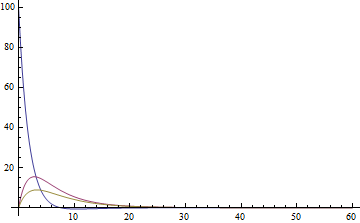 |