The Planar Mechanics library was created especially for modeling multibody systems with two-dimensional mechanical components. Compared to the MultiBody library, currently available in the Modelica Standard Library, it is simpler to use and it is more optimized to planar modeling. Planar models of mechanical systems are useful in many different applications, for example, in contact problems that are more easily modeled in 2D than in 3D.
System Modeler Modelica Library Store
Planar Mechanics
To run this example, you'll need
The latest versions of System Modeler and Mathematica.
Please make a selection:
Get afree trial Continue
with download
Features
- Hierarchical and large-scale modeling of mechanical systems in two dimensions
- Compact library and model design, which means fewer parameters and shorter build time
- Subpackages with components for vehicle and gear modeling, joints, sensors and visualizers
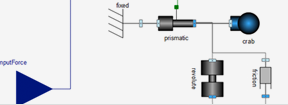
- Numerous example models that show the wide variety of systems that can be modeled with the library, such as robots, vehicles and crab cranes
- A PlanarWorld model that can be used to set up almost all global parameters, such as the animation of joints, parts and sources
- Built-in animation of all models, providing an easy visual check of your modeling process
- Allows the combination of components from the Planar Mechanics library and components from the Modelica Standard Library


Details
Version
1.6
Platforms
All Platforms
Updated
January 2024
Requirements
None
Size
<10MB
Language
English
License
Licensed by DLR e.V. under the 3-Clause BSD License