WolframSistemas de controlUna parte fundamental de
Wolfram Language
Modele, diseñe, implemente.
Modele el entorno. Diseñe un controlador. Implemente al mundo real. Todo en un flujo de trabajo altamente integrado, desarrollado para estudiantes y profesionales.
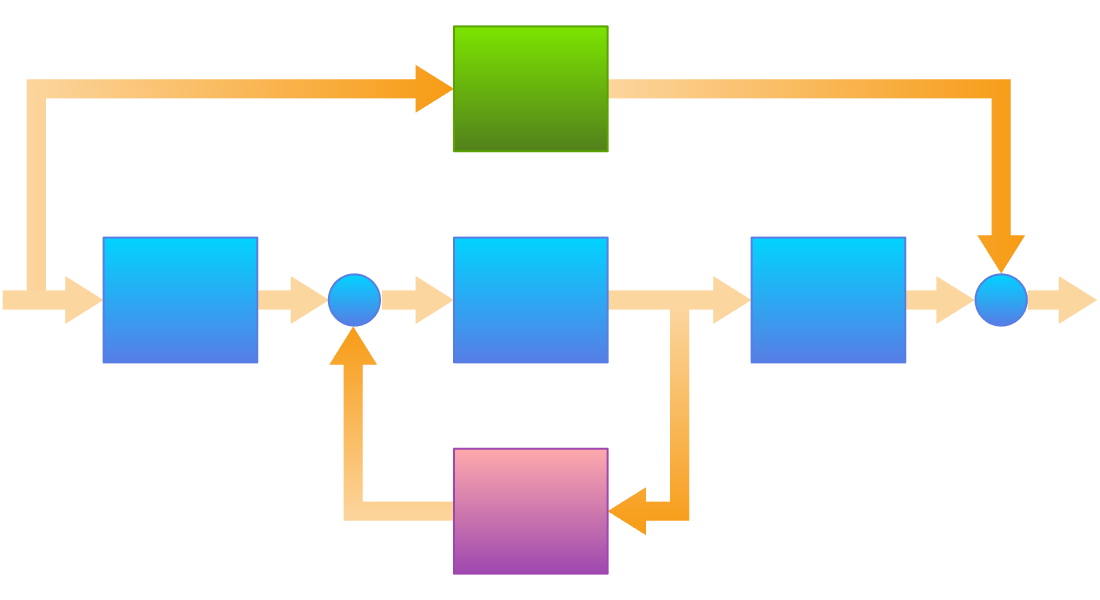
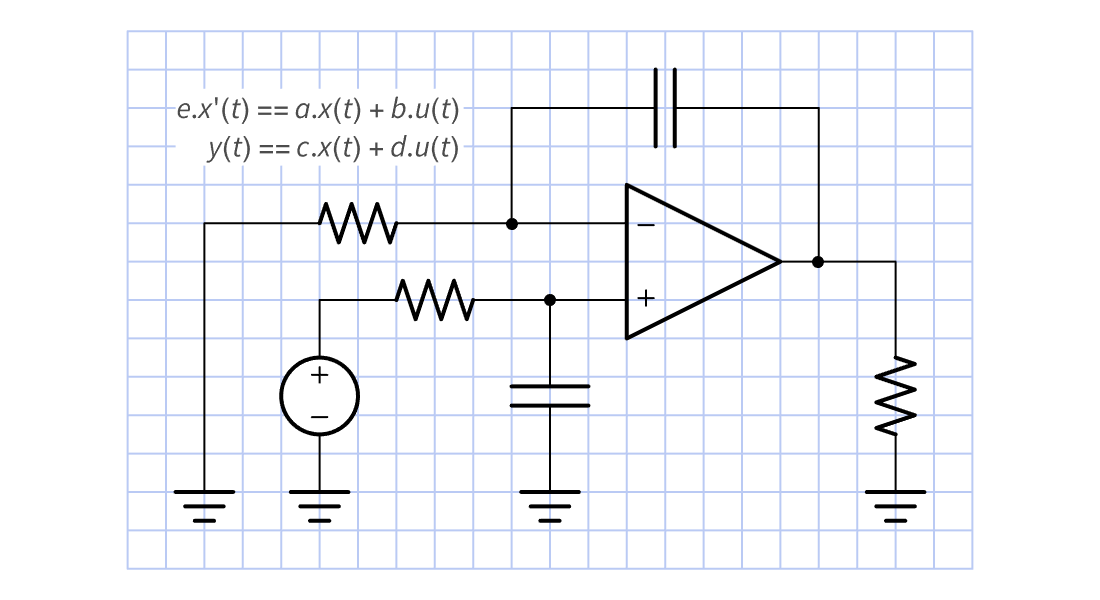
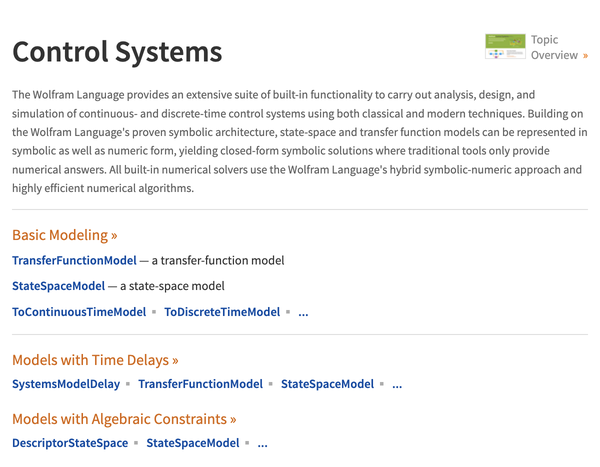
Modelos basados en bloques
Cree bloques de modelos de espacio de estados o funciones de transferencia directamente o a partir de ecuaciones diferenciales o de diferencia. Conéctelos para formar sistemas de mayor tamaño. Use los modelos resultantes para análisis, diseño e implementación.
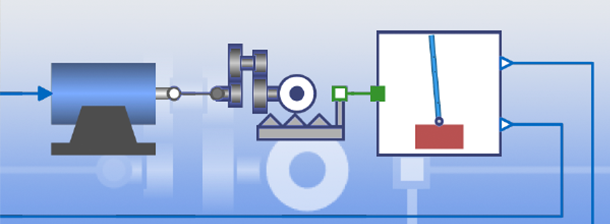
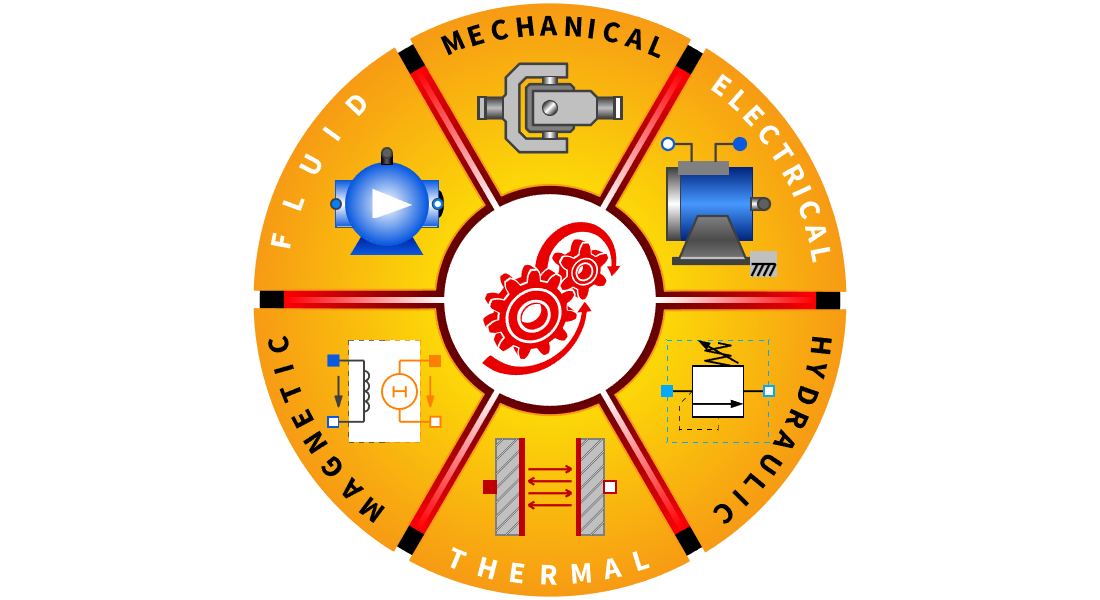
Modelos basados en componentes
Arrastre, suelte y conecte componentes de modelos como piezas de Lego para obtener modelos multidominio de alta fidelidad. Úselos para simulación, validación, y para derivar modelos basados en bloques para el diseño de controles.
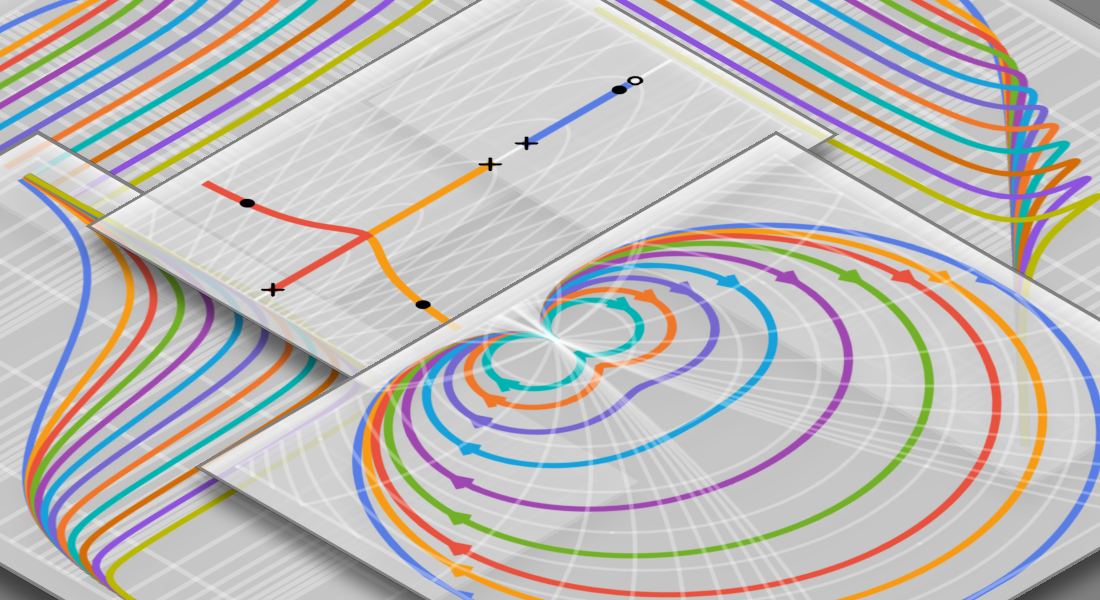
Diseño gráfico
Diseñe y analice sistemas de control usando técnicas gráficas tales como Bode, Nyquist, lugar de raíces y otras representaciones gráficas. Los ejemplos típicos incluyen diseño "lead-lag", análisis de estabilidad y análisis de robustez.
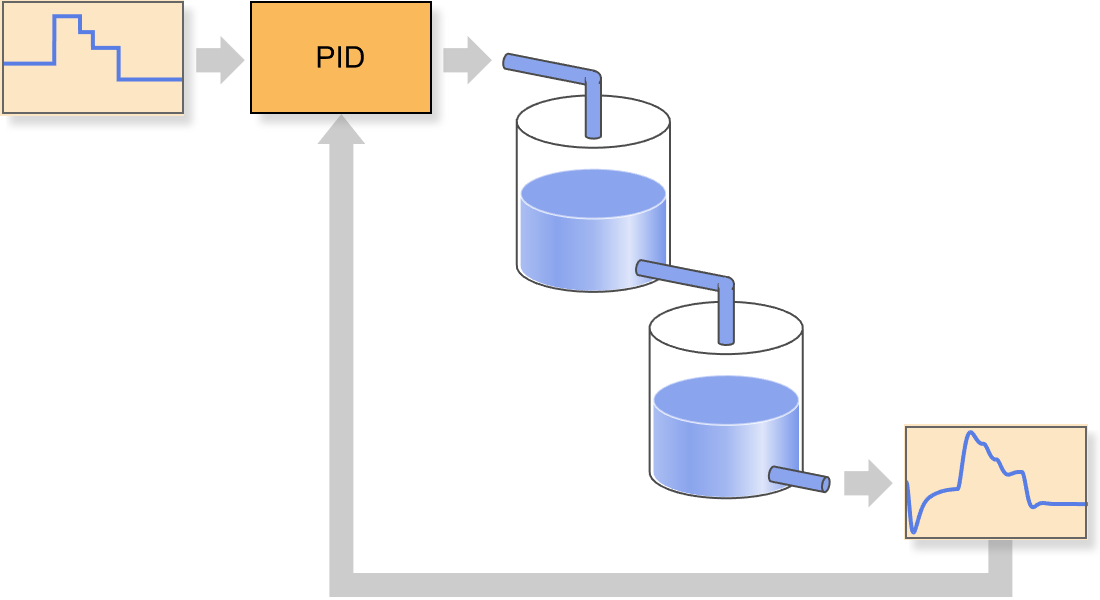
Diseño PID
Ajuste controladores PID automáticamente basándose en modelos y reglas de ajuste. Mejore el seguimiento del sistema y el rechazo de perturbaciones. Incluye reglas de ajuste incorporadas, como las de Ziegler–Nichols, Cohen–Coon y muchas más.
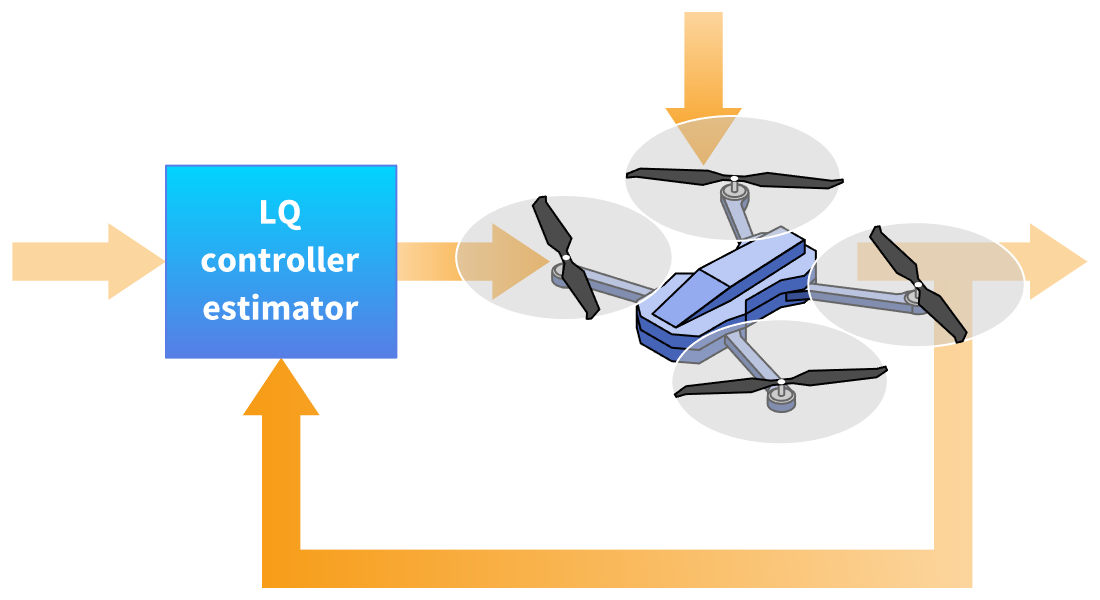
Diseño LQ
Diseñe controladores y estimadores utilizando métodos de optimización cuadrática lineal (LQ por sus siglas en inglés). Resuelva problemas de regulación o seguimiento. Incluye soporte incorporado para técnicas estándar, como LQR, LQG y Kalman.
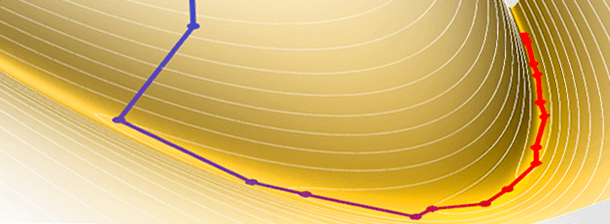
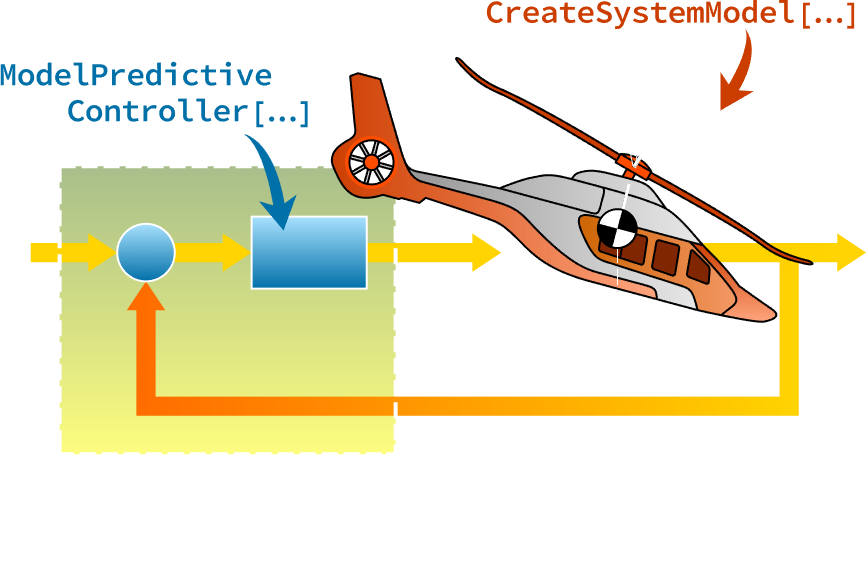
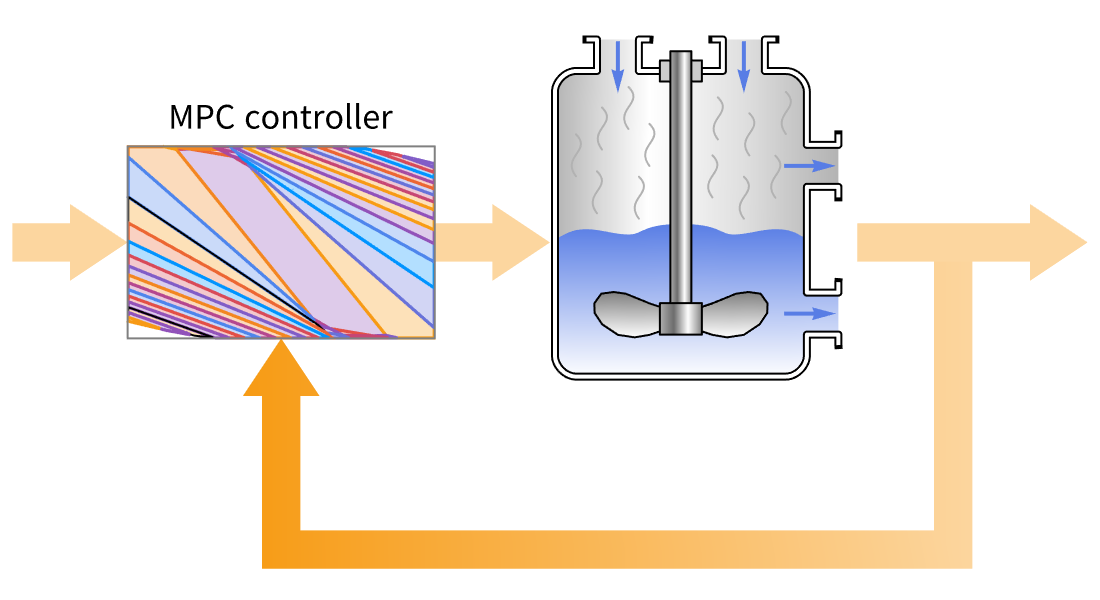
Diseño de MPC
Diseñe controladores predictivos por modelo (MPC por sus siglas en inglés) explícitos para aplicaciones de muestreo rápido y aquellas con potencia de cálculo limitada, utilizando optimización paramétrica fuera de línea de forma automática. Resuelva problemas de regulación o seguimiento con restricciones para minimización de costos con normas de 1, 2 o ∞ cuadrados.
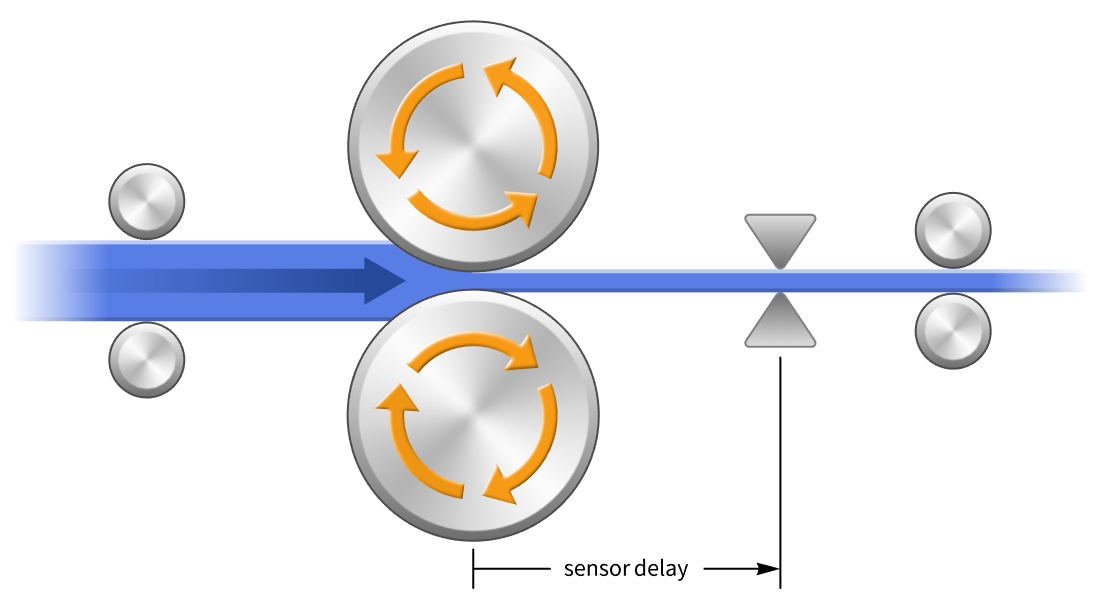
Diseño aplazado y de descriptores
Diseñe controladores para modelos de retardo y una mezcla de ecuaciones dinámicas y algebraicas. Los retardos, originados por demoras en la comunicación, entre otras razones, pueden causar inestabilidad a menos que se compensen. Use procedimientos especializados tales como un compensador de Smith, o reduzca a modelos estándar utilizando aproximaciones.
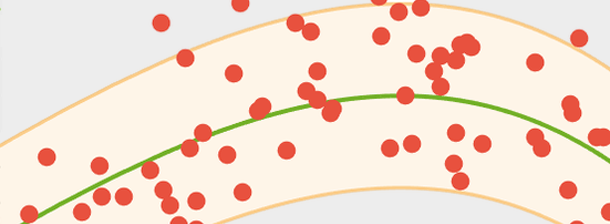
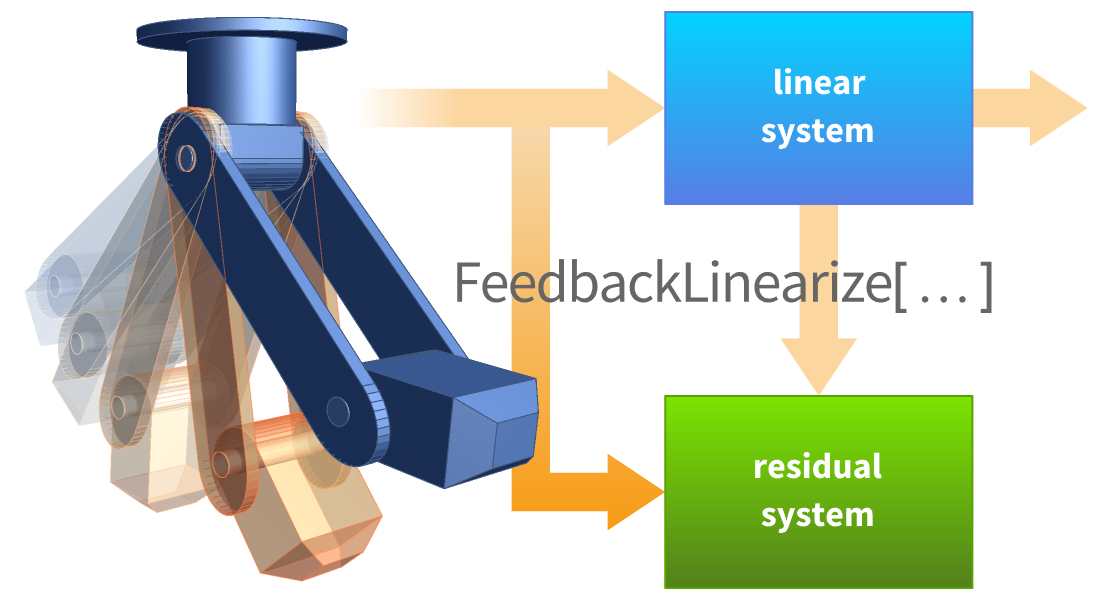
Diseño afín y no lineal
Diseñe controladores no lineales para sistemas en los cuales las no linealidades desempeñan un papel importante. Esto resultará en una degradación de rendimiento menor en regiones alejadas del punto de operación. Use técnicas simbólicas tales como linealización por retroalimentación, regulación de salida y más.
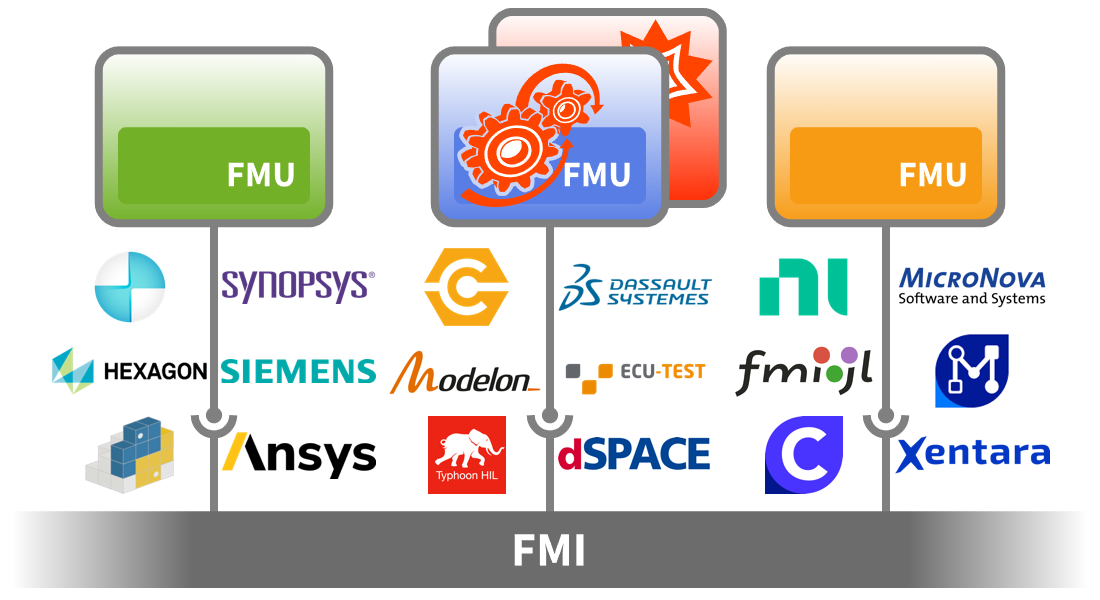
Implementación de FMI
Implemente controladores como unidades de simulación funcional (FMU por sus siglas en inglés) a más de 100 otras herramientas compatibles con FMI. Colabore de manera efectiva en un entorno donde los subsistemas son diseñados por distintas empresas y herramientas. Identifique defectos tempranamente y evite serios problemas de integración más adelante.
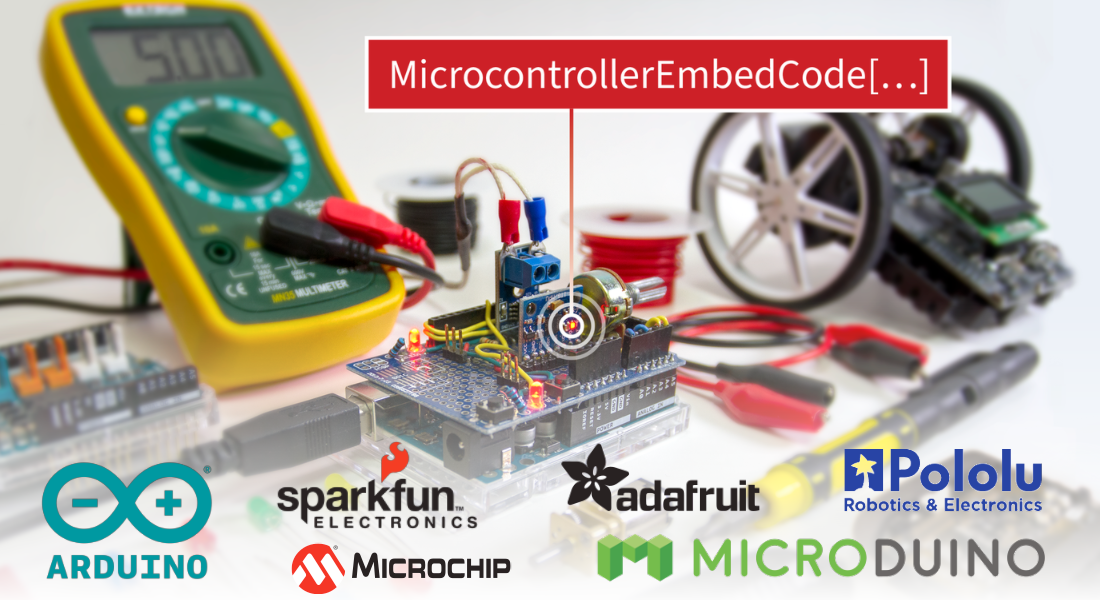
Implementación de microcontroladores
Genere e implemente de manera automática diseños de control y código de adquisición de datos a microcontroladores. Elimine iteraciones laboriosas y propensas a errores del código fuente de menor nivel.
Documentación de Wolfram Sistemas de control
Wolfram Sistemas de control es una parte integrada de Wolfram Language. El sistema completo contiene más de 6000 funciones incorporadas que abarcan todas las áreas de la computación, todas cuidadosamente integradas de manera que trabajen perfectamente en conjunto.
Wolfram Language
 Guide
Guide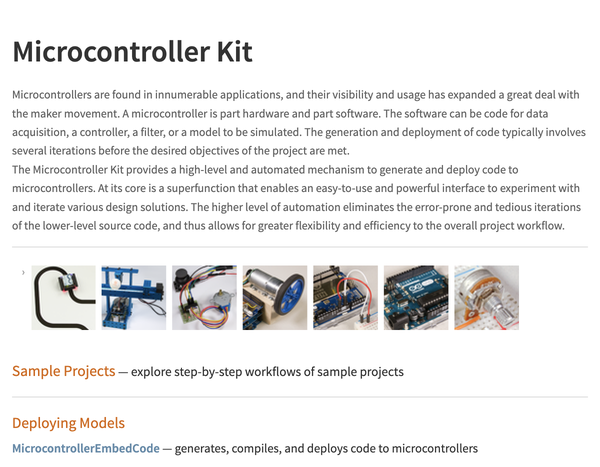 Guide
Guide Guide
Guide