WolframSistemas de ControlePARTE CENTRAL DA
WOLFRAM LANGUAGE
Modele, Desenhe, Implemente.
Modele o ambiente. Desenhe um controlador. Implemente no mundo real. Tudo em um fluxo de trabalho altamente integrado, desenvolvido para aprendizes e profissionais.
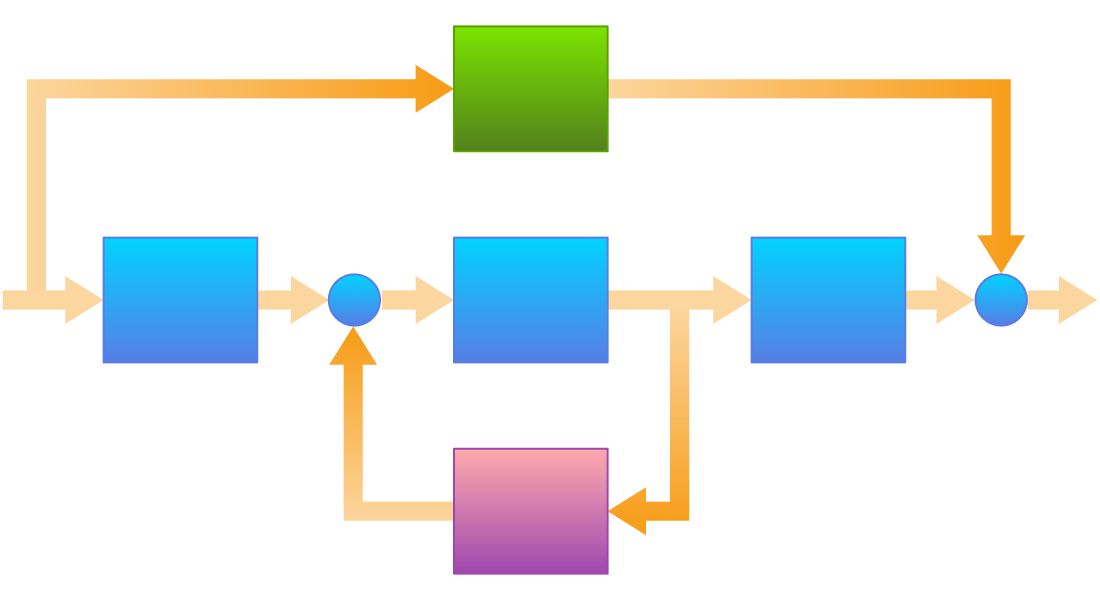
Modelos com Base em Blocos
Crie blocos de modelos de espaço de estados ou função de transferência diretamente ou a partir de equações diferenciais ou de diferenças. Conecte-os para formar sistemas maiores. Utilize os modelos resultantes para análise, desenho e implementação.
Modelos com Base em Componentes
Arraste, solte e conecte os componentes do modelo como peças de Lego para obter modelos multidomínio de alta fidelidade. Utilize-os para simulação, validação e para derivar modelos baseados em blocos para o projeto de controle.
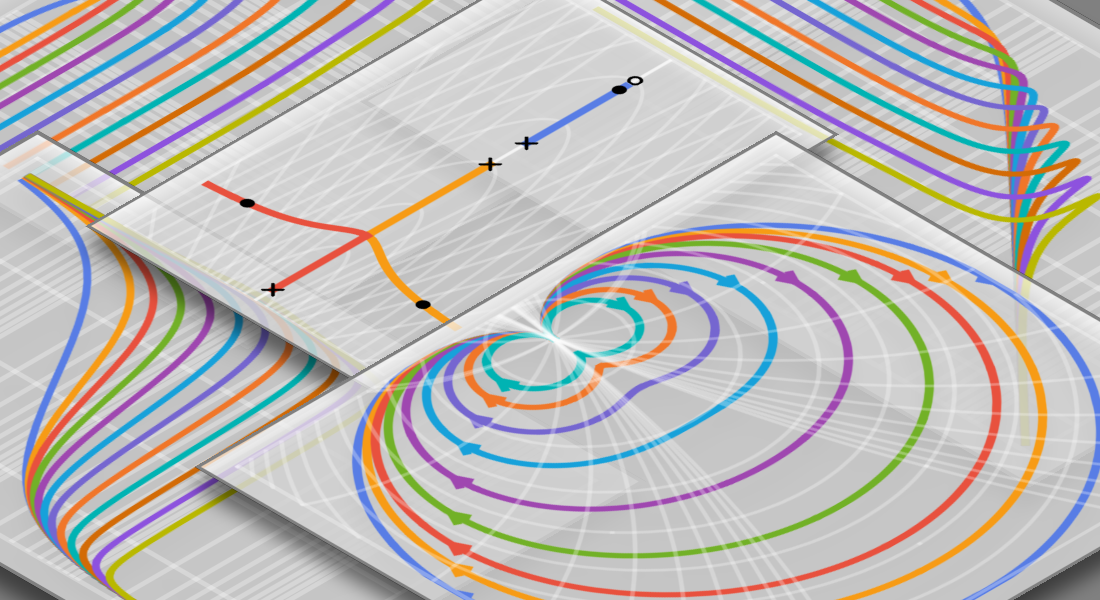
Design Gráfico
Desenhe e analise sistemas de controle utilizando técnicas gráficas como Bode, Nyquist, locus de raízes e outros gráficos. Exemplos comuns incluem o projeto de compensadores lead-lag, análise de estabilidade e análise de robustez.
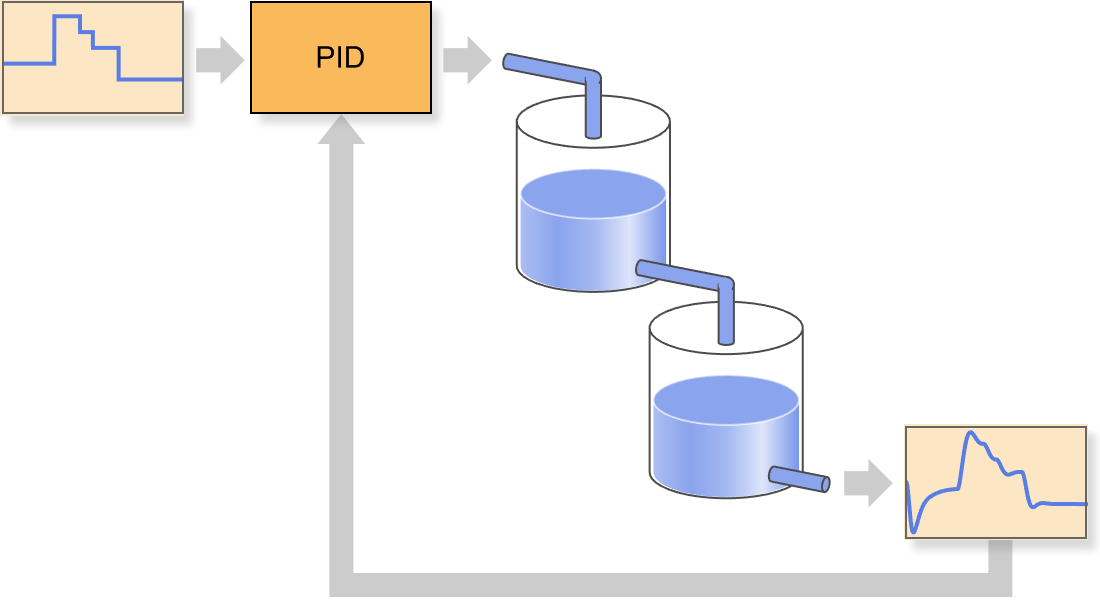
Design de PID
Ajuste automaticamente controladores PID com base em modelos e regras de ajuste. Melhore o rastreamento do sistema e a rejeição de perturbações. Possui regras de ajuste embutidas, incluindo Ziegler-Nichols, Cohen-Coon e várias outras.
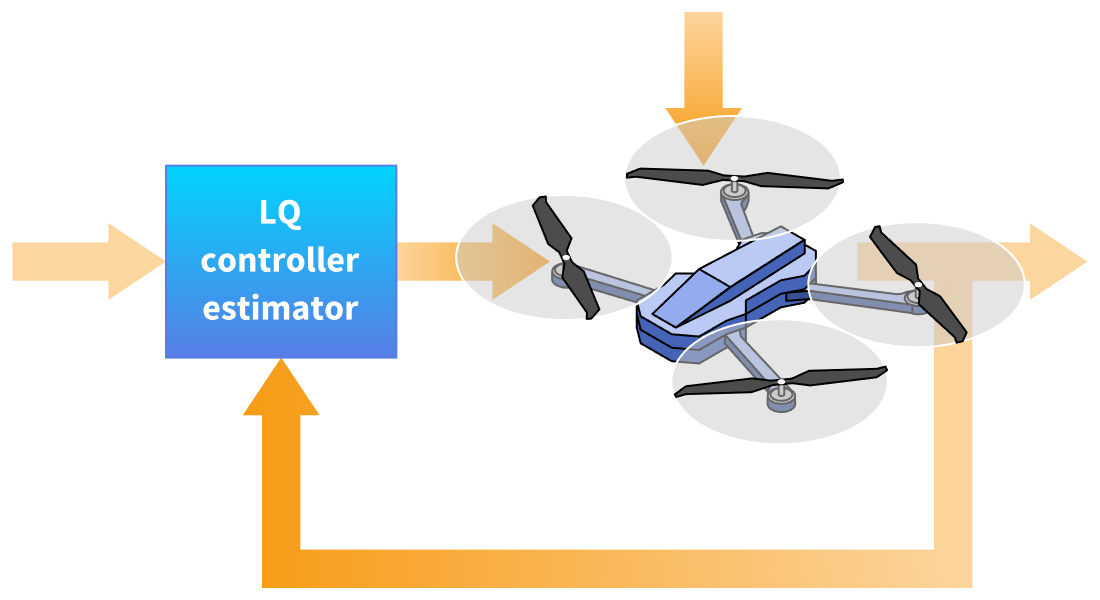
Design de LQ
Desenhe controladores e estimadores utilizando métodos de otimização linear quadrática (LQ). Resolva problemas de regulação ou rastreamento. Possui suporte embutido para técnicas padrão, incluindo LQR, LQG e Kalman.
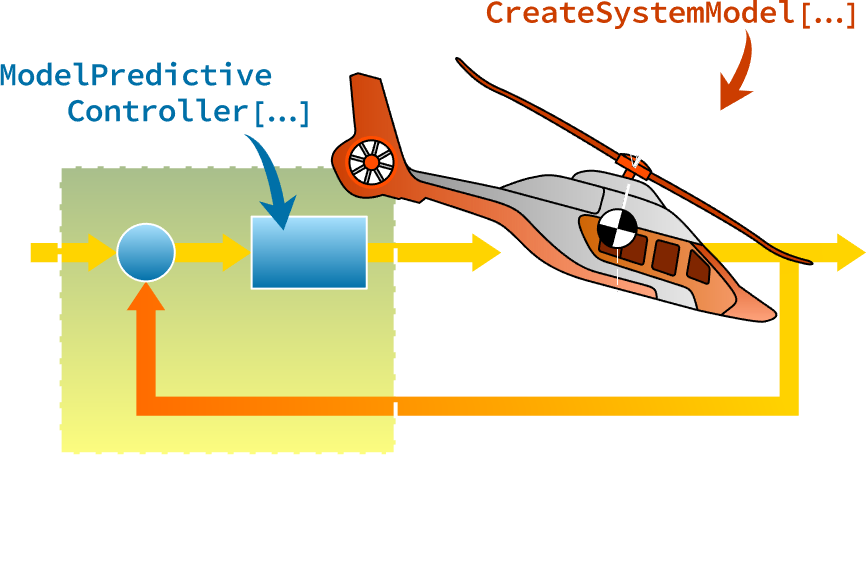
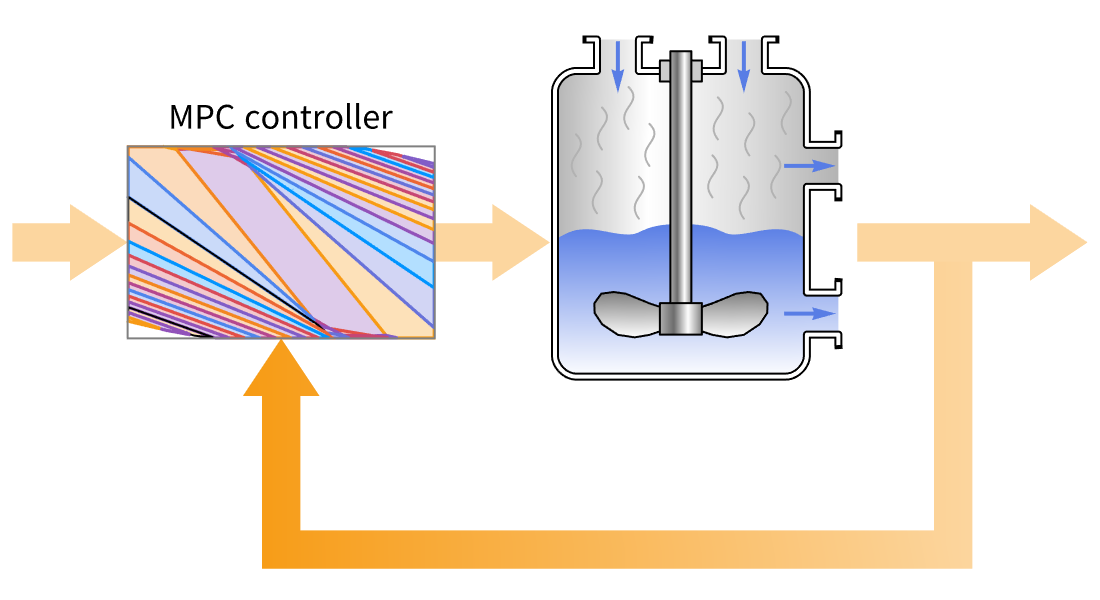
Design de MPC
Desenhe controladores preditivos de modelo explícito (MPC) para aplicações de amostragem rápida e aquelas com poder computacional limitado, utilizando automaticamente a otimização paramétrica offline. Resolva problemas de regulação ou rastreamento com restrições, minimizando custos com norma 1, norma ao quadrado 2 ou norma infinito.
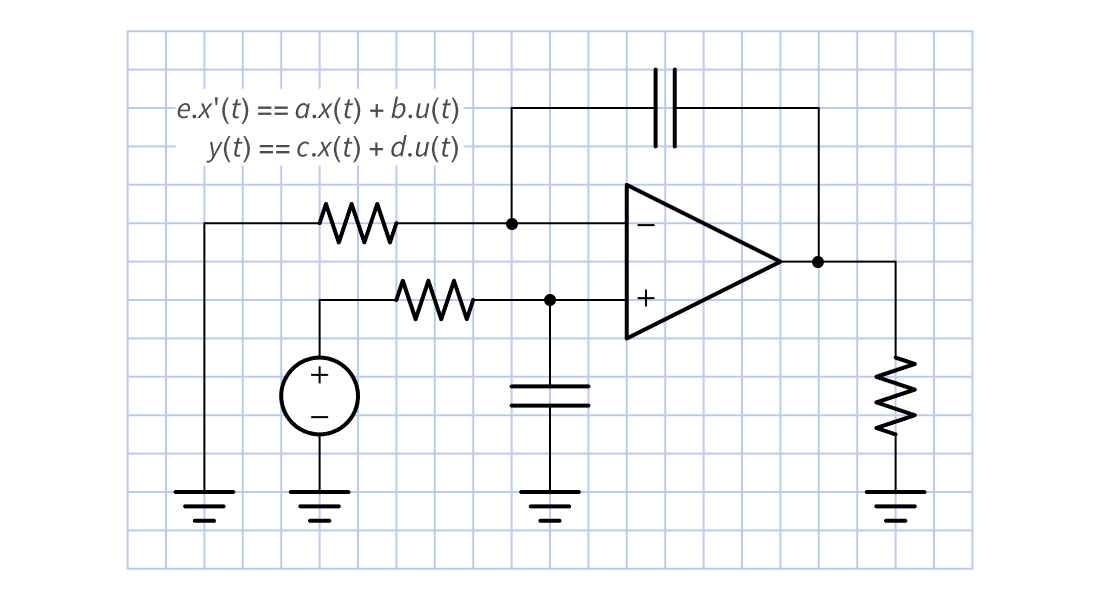
Design de Controladores com Atrasos e Descritores
Desenhe controladores para modelos com atrasos e uma mistura de equações dinâmicas e algébricas. Atrasos, como atrasos de comunicação, podem causar instabilidades a menos que sejam compensados. Utilize procedimentos especializados, como um compensador de Smith, ou reduza os modelos a modelos padrão usando aproximações.

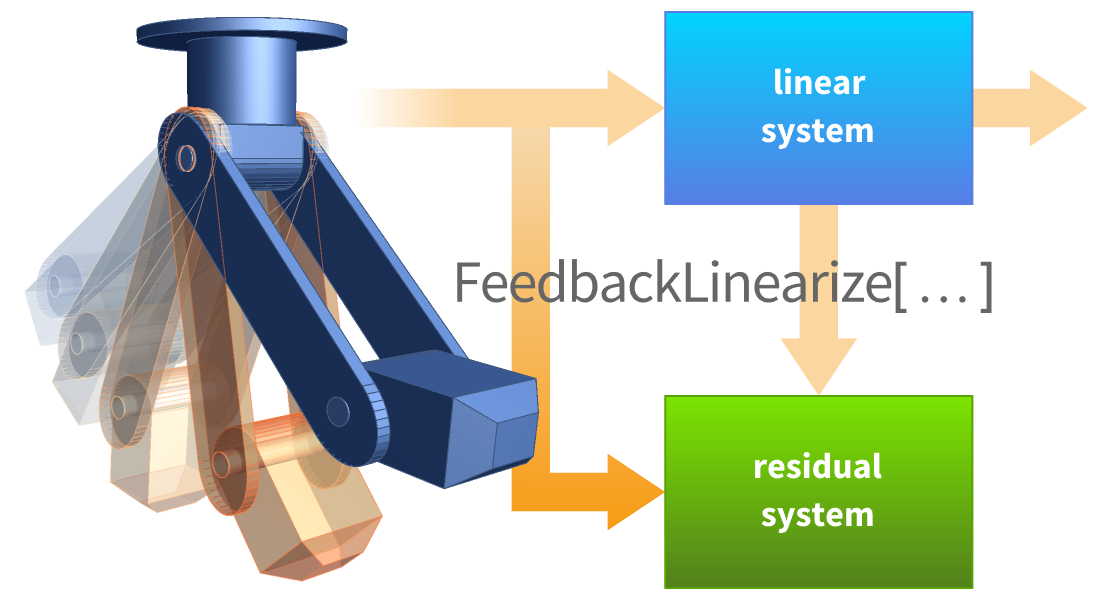
Design de Controle Afim e Não Linear
Desenhe controladores não lineares para sistemas nos quais as não linearidades desempenham um papel importante. Isso resulta em menor degradação de desempenho em regiões distantes do ponto de operação. Utilize técnicas simbólicas, como linearização por realimentação, regulação de saída e outras.
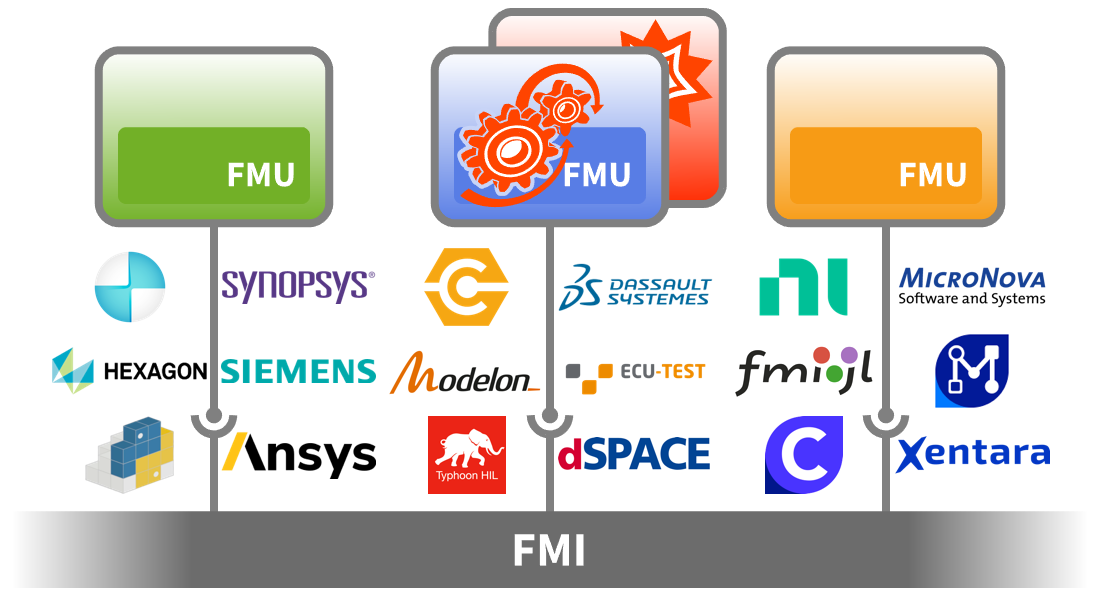
Implementação de FMI
Implemente controladores como Unidades de Simulação Funcional (Functional Mockup Units - FMUs) em mais de 100 outras ferramentas compatíveis com o FMI (Functional Mockup Interface). Colabore de forma eficaz em um ambiente em que subsistemas são projetados por diferentes empresas e ferramentas. Identifique defeitos precocemente e evite grandes problemas de integração futura.
Implementação de Microcontroladores
Gere e implemente automaticamente projetos de controle e código de aquisição de dados em microcontroladores. Elimine iterações propensas a erros e tediosas de código-fonte de nível inferior.
Documentação para Wolfram Sistemas de Controle
Wolfram Sistemas de Controle é uma parte embutida da Wolfram Language. Todo o sistema contém mais de 6 mil funções integradas, abrangendo todas as áreas da computação — tudo cuidadosamente integrado para que funcione perfeitamente em conjunto.
Escopo Completo & Documentação
 Guide
Guide Guide
Guide Guide
Guide