Wolfram控制系統Wolfram 語言
的核心部分
建模、設計、部署.
對環境進行建模。設計一個控制器。部署到真實世界。全部都在一個高度整合,為學習者和專業人士開發的工作流程中。
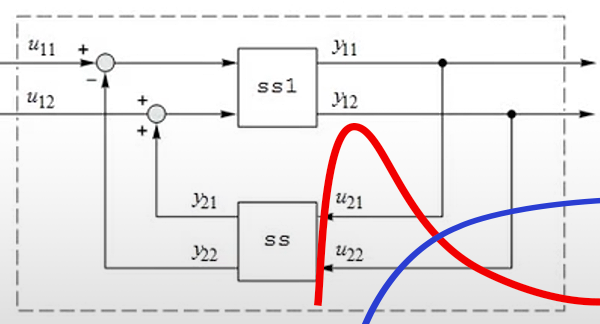
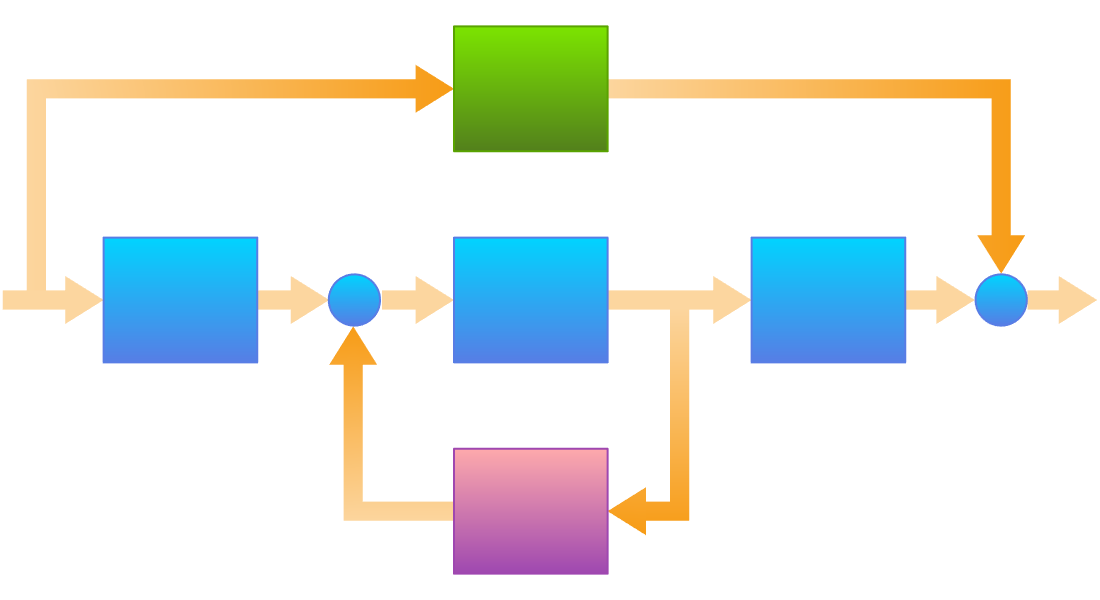
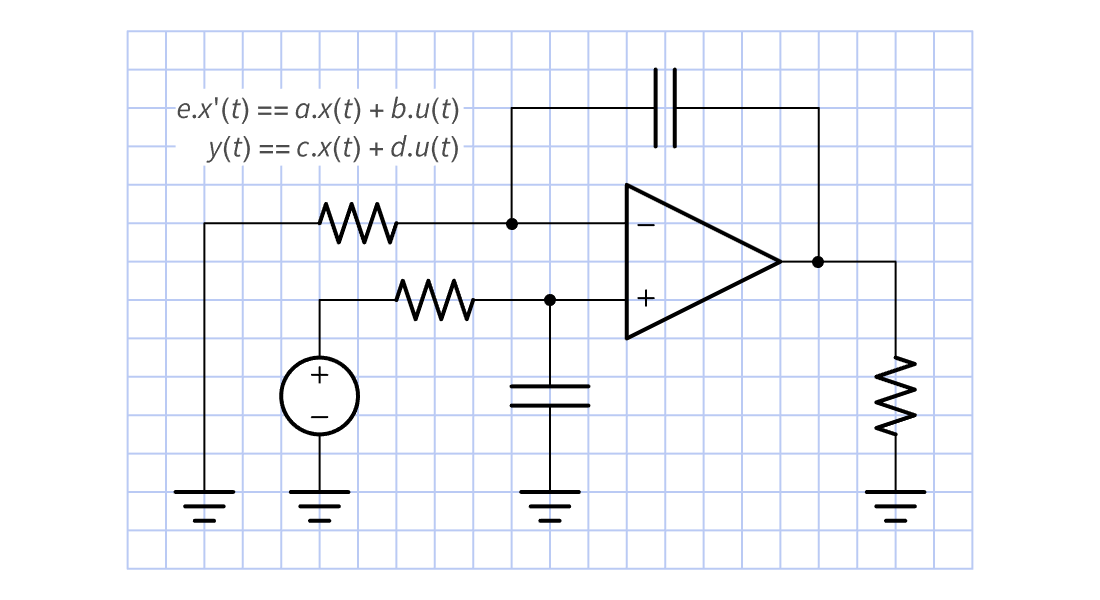
基於區塊的模型
直接或從微分或差分方程式創建狀態空間或傳遞函數模型模塊。將其連接起來形成更大的系統。使用產生的模型進行分析、設計和部署。
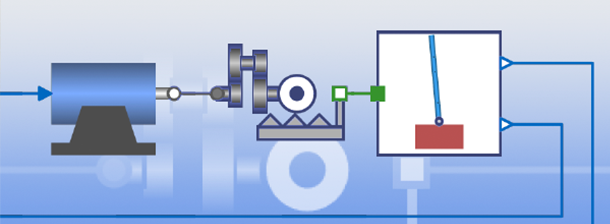
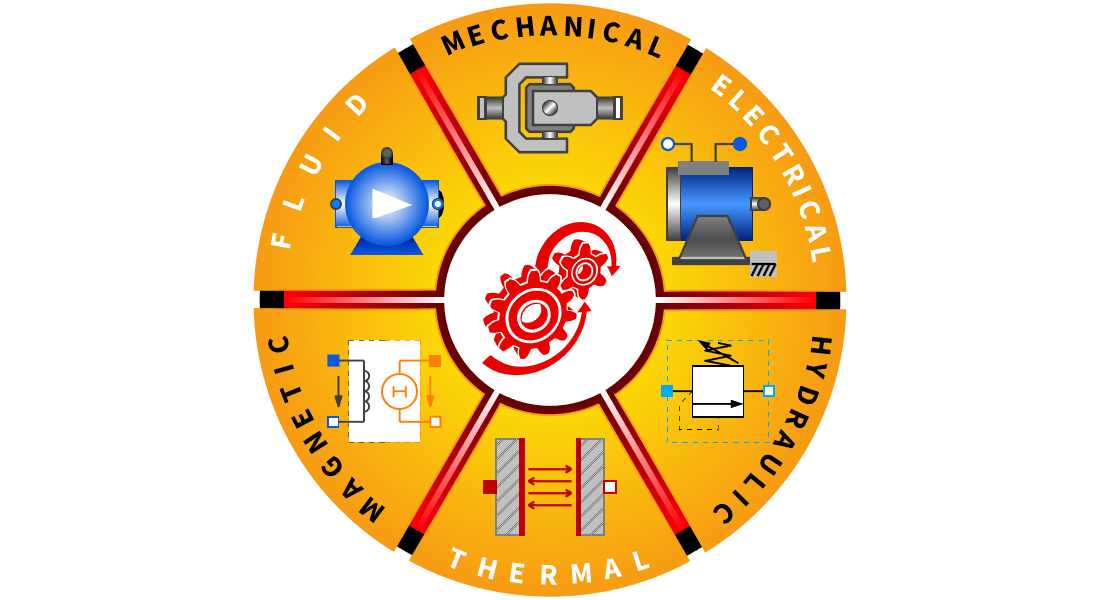
基於組件的模型
拖、放和連結模型組件如同樂高積木以獲得高傳真多域模型。用其進行模擬、驗證並導出用於控制設計的基於區塊的模型。
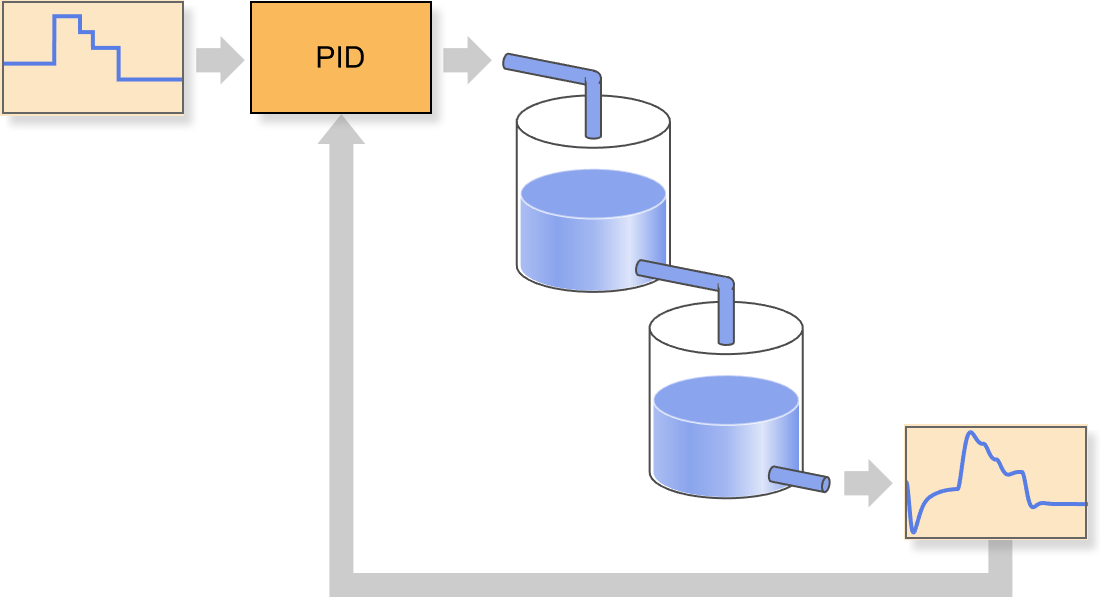
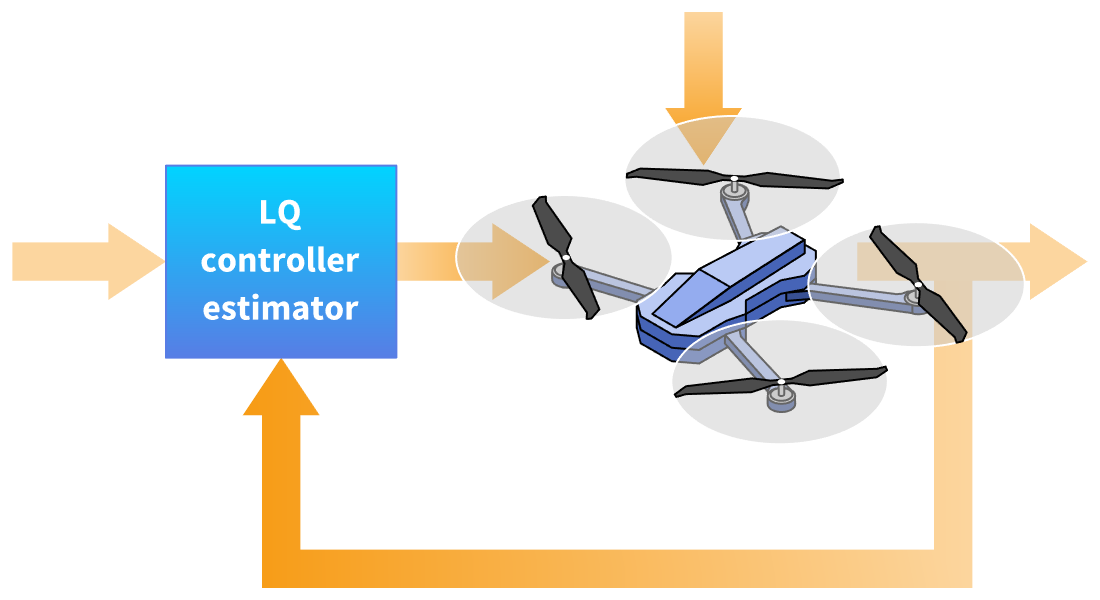
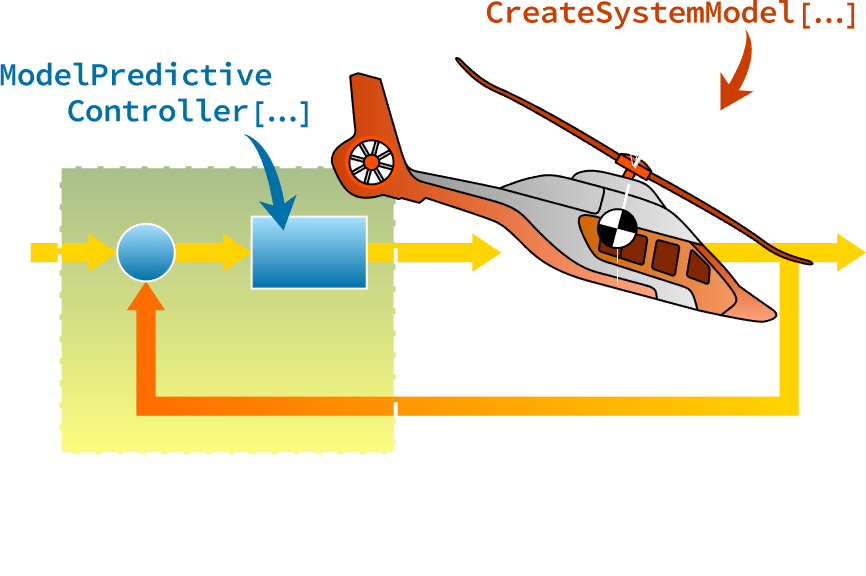
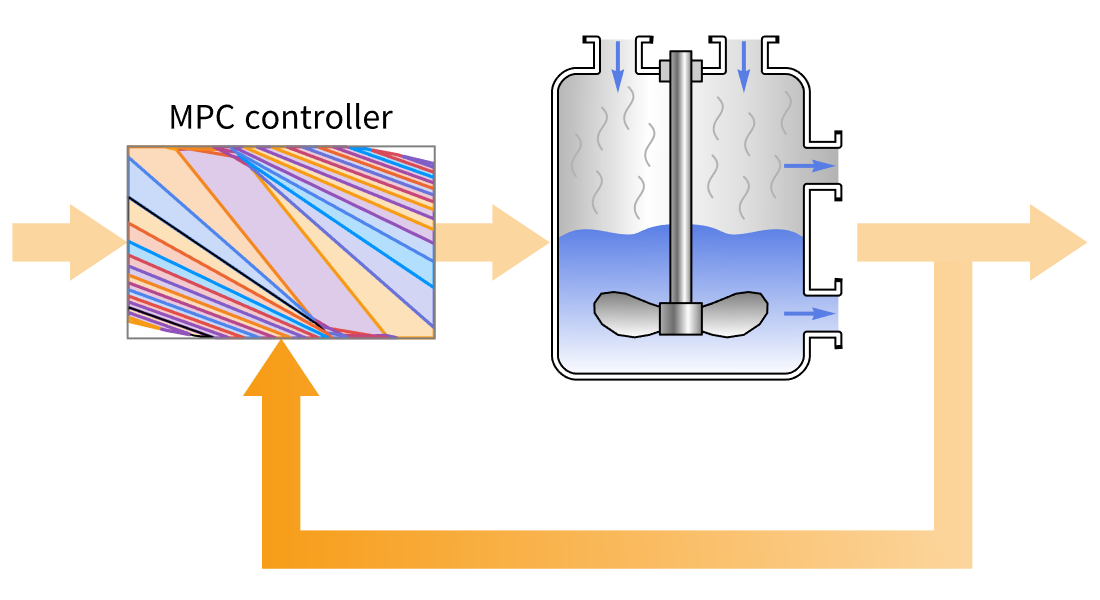
MPC 設計
通過自動使用離線參數最佳化,為快速採樣應用和計算能力有限的應用設計顯式模型預測控制器 (MPC)。解決 1-、平方 2- 或 ∞-賦範成本最小化的限制調節或追蹤問題。


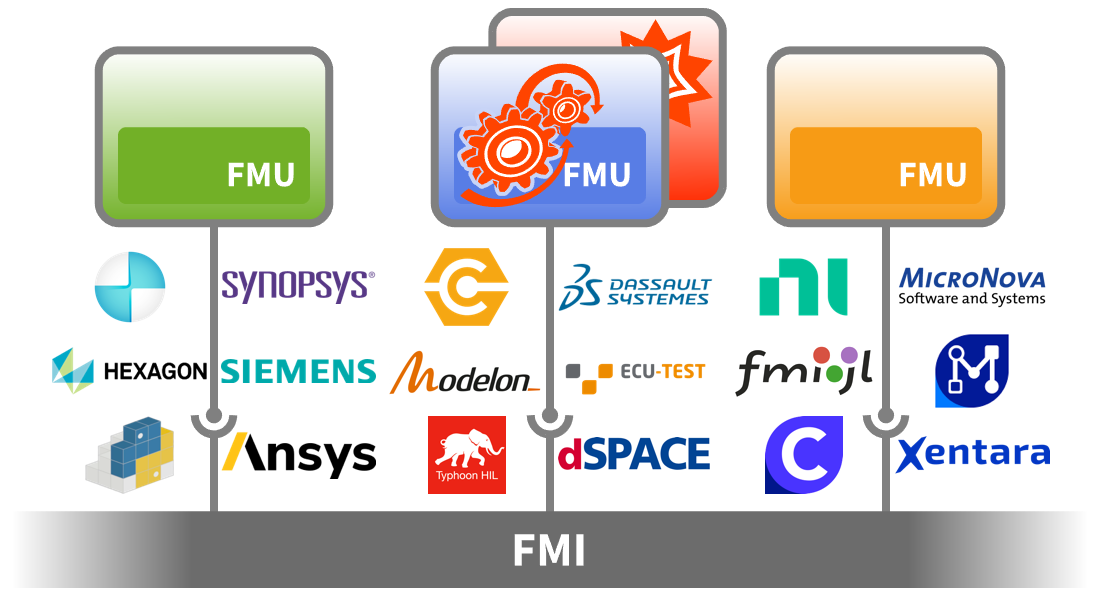
FMI 部署
將控制器作為功能模型單元 (FMU) 部署到 100 多個其他 FMI 相容工具。在子系統由不同公司和工具設計的環境中進行有效合作。 及早發現缺陷並避免重大下游匯整問題。
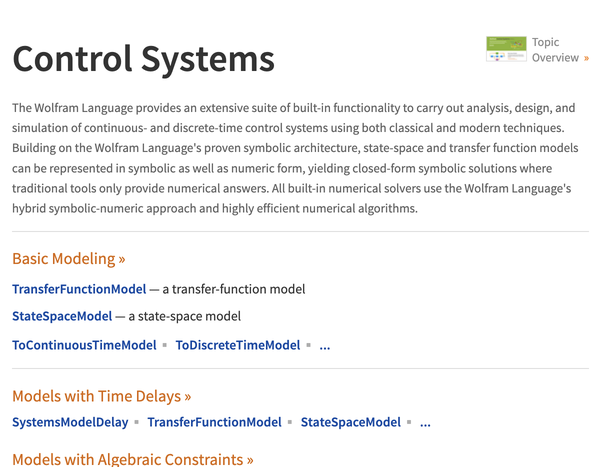
Wolfram 控制系統文檔
Wolfram 控制系統 是 Wolfram 語言 的部分匯集。完整的系統包含 6,000 多個內建函數,涵蓋所有計算領域 — 都經過精心整合,因此可以完美地將工作結合完成。
完整範圍和文件

AffineStateSpaceModel ▪ AsymptoticOutputTracker ▪ BodePlot ▪ CarlemanLinearize ▪ ContinuousTimeModelQ ▪ ControllabilityGramian ▪ ControllabilityMatrix ▪ ControllableDecomposition ▪ ControllableModelQ ▪ DescriptorStateSpace ▪ DiscreteInputOutputModel ▪ DiscreteLQEstimatorGains ▪ DiscreteLQRegulatorGains ▪ DiscreteTimeModelQ ▪ DualSystemsModel ▪ EstimatorGains ▪ EstimatorRegulator ▪ FeedbackLinearize ▪ FeedbackSector ▪ FeedbackSectorStyle ▪ FeedbackType ▪ FullInformationOutputRegulator ▪ GainMargins ▪ GainPhaseMargins ▪ InternallyBalancedDecomposition ▪ JordanModelDecomposition ▪ KalmanEstimator ▪ KroneckerModelDecomposition ▪ LinearizingTransformationData ▪ LQEstimatorGains ▪ LQGRegulator ▪ LQOutputRegulatorGains ▪ LQRegulatorGains ▪ MinimalStateSpaceModel ▪ ModelPredictiveController ▪ NicholsGridLines ▪ NicholsPlot ▪ NonlinearStateSpaceModel ▪ NyquistGridLines ▪ NyquistPlot ▪ ObservabilityGramian ▪ ObservabilityMatrix ▪ ObservableDecomposition ▪ ObservableModelQ ▪ OutputControllabilityMatrix ▪ OutputControllableModelQ ▪ OutputResponse ▪ PhaseMargins ▪ PhaseRange ▪ PIDData ▪ PIDDerivativeFilter ▪ PIDFeedforward ▪ PIDTune ▪ PoleZeroMarkers ▪ RootLocusPlot ▪ SamplingPeriod ▪ SingularValuePlot ▪ SmithDelayCompensator ▪ StabilityMargins ▪ StabilityMarginsStyle ▪ StateFeedbackGains ▪ StateOutputEstimator ▪ StateResponse ▪ StateSpaceModel ▪ StateSpaceRealization ▪ StateSpaceTransform ▪ StateTransformationLinearize ▪ SystemsConnectionsModel ▪ SystemsModelControllerData ▪ SystemsModelDelay ▪ SystemsModelDelayApproximate ▪ SystemsModelDelete ▪ SystemsModelDimensions ▪ SystemsModelExtract ▪ SystemsModelFeedbackConnect ▪ SystemsModelLabels ▪ SystemsModelLinearity ▪ SystemsModelMerge ▪ SystemsModelOrder ▪ SystemsModelParallelConnect ▪ SystemsModelSeriesConnect ▪ SystemsModelStateFeedbackConnect ▪ SystemsModelVectorRelativeOrders ▪ ToContinuousTimeModel ▪ ToDiscreteTimeModel ▪ TransferFunctionCancel ▪ TransferFunctionExpand ▪ TransferFunctionFactor ▪ TransferFunctionModel ▪ TransferFunctionPoles ▪ TransferFunctionZeros ▪ InputOutputResponse ▪ InputOutputResponseData ▪ RiccatiSolve ▪ DiscreteRiccatiSolve ▪ LyapunovSolve ▪ DiscreteLyapunovSolve ▪ SystemModelExamples ▪ SystemModel ▪ SystemModels ▪ SystemModelSimulate ▪ SystemModelMeasurements ▪ SystemModelSimulationData ▪ SystemModelSimulateSensitivity ▪ SystemModelPlot ▪ ParametricPlot ▪ Plot ▪ ListLinePlot ▪ LogPlot ▪ SystemModelParametricSimulate ▪ ParametricFunction ▪ NMinimize ▪ FindMinimum ▪ NMaximize ▪ SystemModelLinearize ▪ FindSystemModelEquilibrium ▪ ConnectSystemModelController ▪ SystemModelReliability ▪ ReliabilityDistribution ▪ SurvivalFunction ▪ StructuralImportance ▪