Seven-Link Mechanical System
| In[1]:= |  X |
| In[10]:= | 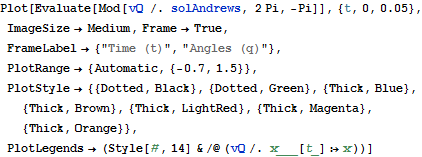 X |
| In[11]:= | 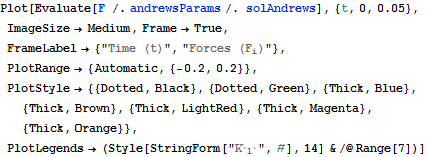 X |
| In[12]:= | 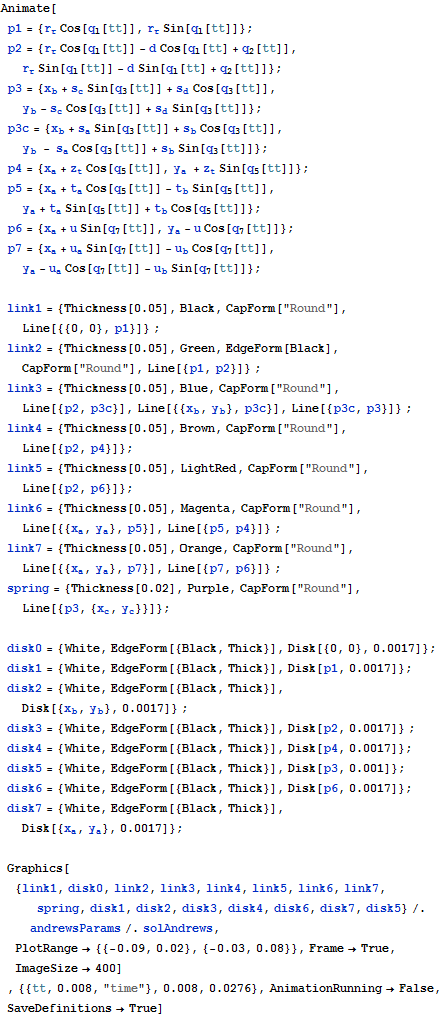 X |
Model Andrew's squeezer mechanism.
 X |
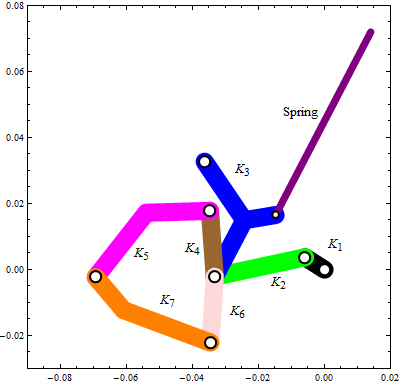
The system consists of seven links of various shapes, with one of the links attached to a spring. The shortest link is driven by a motor, which in turn moves all the other links.
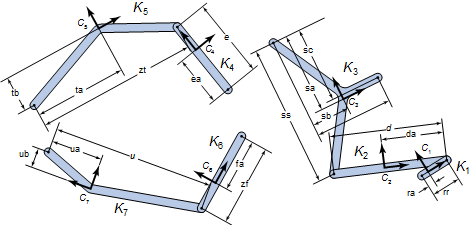
The dimensions associated with the various links are shown below. The seven links are labeled  -
- . The notation for the parameters used in the model and their description can be found in the following reference.
. The notation for the parameters used in the model and their description can be found in the following reference.
E. Hairer and G. Wanner, Solving Ordinary Differential Equations II, Stiff and Differential-Algebraic Problems, 2nd ed., Springer Series in Computational Mathematics, Vol. 14, New York: Springer, 1996.
 X |
The motion of the system can be defined using seven angles. The angles are defined as  -
- here. The equations of motion can be derived using Hamiltonian principles, resulting in a a system of equations of the form
here. The equations of motion can be derived using Hamiltonian principles, resulting in a a system of equations of the form  where
where  is a mass matrix,
is a mass matrix,  is a vector of forces,
is a vector of forces,  is a vector of constraints, and
is a vector of constraints, and  is Lagrange multipliers.
is Lagrange multipliers.
| In[2]:= |  X |
Define the mass matrix  associated with the system.
associated with the system.
| In[3]:= | 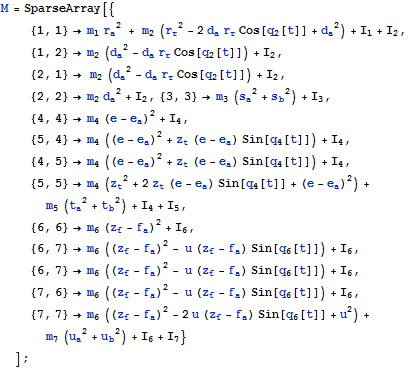 X |
Define the various forces  associated with the system.
associated with the system.
| In[4]:= | 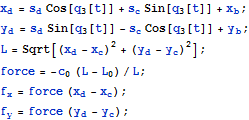 X |
| In[5]:= |  X |
Define the constraint vector  associated with the various links.
associated with the various links.
| In[6]:= |  X |
Construct the equations  and the constraint equations with particular values of the parameters.
and the constraint equations with particular values of the parameters.
| In[7]:= |  X |
Define the initial state of the system to be at rest, with a particular set of angles.
| In[8]:= | 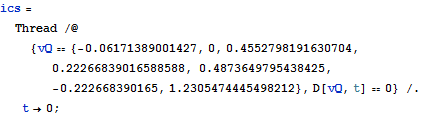 X |
Solve the system and plot the angles and the forces. The motion of the links becomes faster as time progresses. The lines are color coded based on the color of the links.
| In[9]:= | 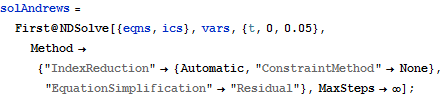 X |
| Out[10]= | 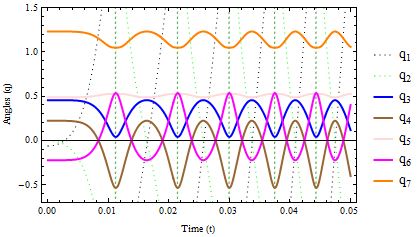 |
| Out[11]= | 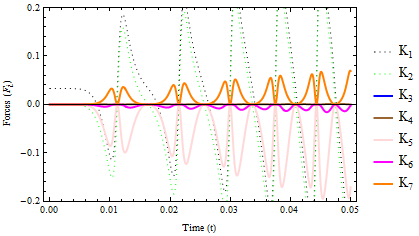 |
| Out[12]= | Play Animation » Stop Animation »  |