Approximate a Time-Delay Model
A TransferFunctionModel with an delay in the denominator has infinitely many poles. TransferFunctionPoles can be used to plot all the poles in a given region.
| In[1]:= | X |
| In[2]:= |  X |
| Out[2]= | 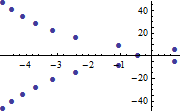 |
Use SystemsModelDelayApproximate to obtain delay-free approximations of time-delay systems. As the order is increased, the approximations converge to the original model.
| In[3]:= | 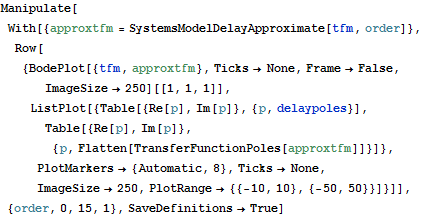 X |
| Out[3]= | Play Animation » Stop Animation »  |