Impulse Elimination
The solution to a StateSpaceModel with a singular descriptor matrix can include differentiated inputs. When the input is discontinuous, the result can be undesirable impulses.
| In[1]:= | 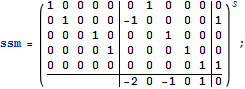 X |
| In[2]:= | X |
| Out[2]= |
If the system is controllable, almost any state feedback controller will eliminate the impulses.
| In[3]:= | X |
| Out[3]= |
| In[4]:= | X |
| Out[4]= | 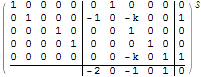 |
| In[5]:= | X |
| Out[5]= |