Génie mécanique
Utilisez System Modeler pour modéliser et simuler des problèmes de dynamique, y compris des mécanismes et des machines avec des comportements cinématiques, dynamiques et thermiques. Étudiez et résolvez les problèmes de vibration.
Pendule inversé
Stabilisez le pendule instable à l’aide d’un régulateur linéaire-quadratique. Ce type de régulateur à rétroaction, souvent utilisé pour contrôler la robotique, est ici utilisé pour maintenir un pendule inversé à la verticale.
Pour exécuter cet exemple, il vous faut
les dernières versions de System Modeler et Mathematica.
Veuillez choisir :
Obtenirun essai gratuit Continuer
le téléchargement
Modèle de pendule inversé
Le modèle du pendule inversé se compose d’un pendule et d’un chariot, l’axe de rotation du pendule étant situé au centre du chariot. Le pendule est initialisé avec son centre de masse au-dessus de l’axe de rotation. Lorsqu’il est situé directement au-dessus du chariot, le pendule est en état d’équilibre et le reste jusqu’à ce qu’il soit perturbé.
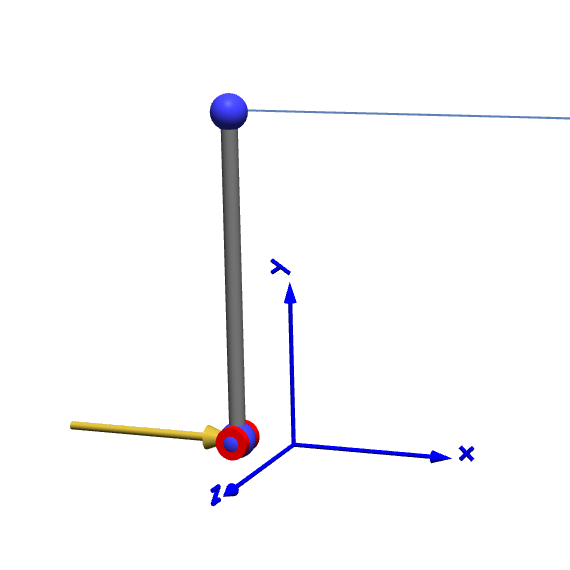
Animation du pendule inversé.
Un pendule qui pend tout droit est stable, alors qu’un pendule inversé est instable. Cela signifie qu’une toute petite perturbation fera basculer le pendule et ne le ramènera jamais à sa position initiale.
Système de commande
On peut utiliser un système de commande pour stabiliser le pendule instable. Ici, un régulateur linéaire-quadratique est utilisé. Tout d’abord, le régulateur mesure les états du système, à savoir la position et la vitesse du chariot, l’angle du pendule et la vitesse angulaire. Le régulateur calcule ensuite la force qui doit être appliquée au chariot pour que tous les états deviennent nuls. En d’autres termes, le régulateur vise à ce que le pendule pointe vers le haut (défini ici comme 0 degré) et que le chariot revienne à l’origine.
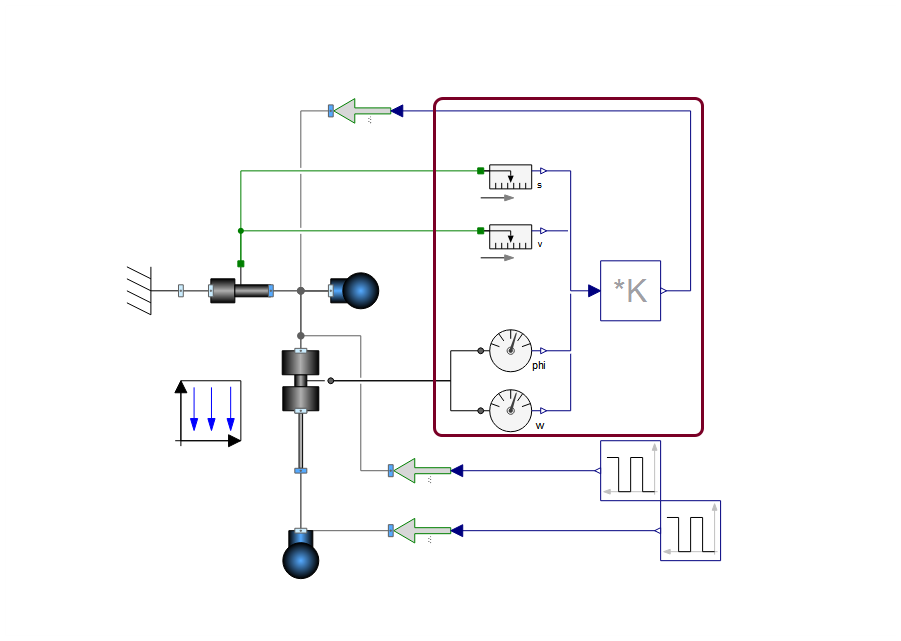
Schéma du modèle de pendule inversé avec le système de commande mis en évidence.
Connexion externe
Avec la bibliothèque gratuite ModelPlug, on peut connecter une carte Arduino au modèle pour permettre de régler les forces de perturbation en temps réel en contrôlant l’entrée des deux broches analogiques spécifiées dans le modèle. On peut le faire avec des potentiomètres à molette, par exemple.
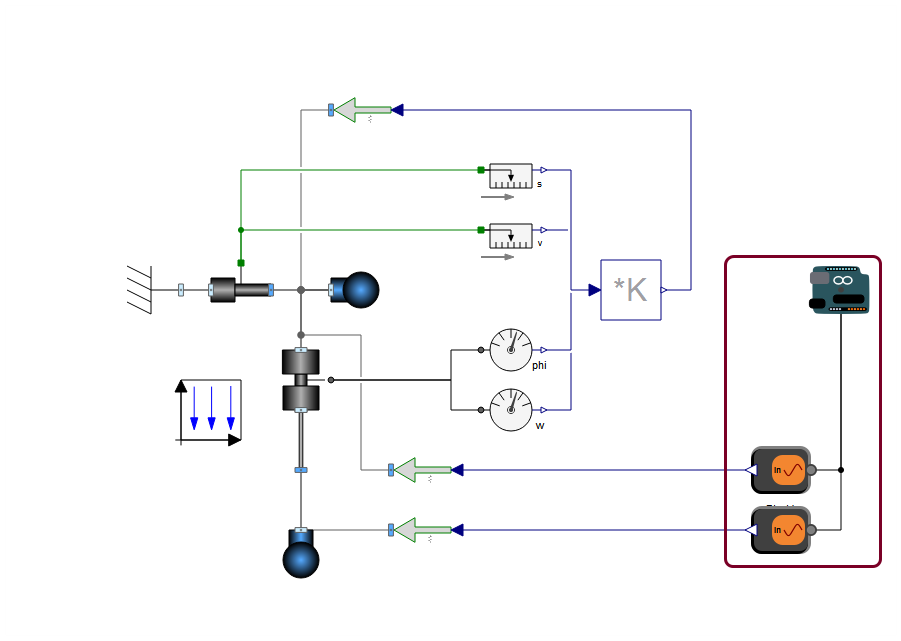
Schéma du modèle de pendule inversé avec la connexion externe mise en évidence.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »