Équipement lourd
Utilisez System Modeler pour concevoir et simuler des équipements lourds avec des comportements cinématiques, dynamiques et thermiques. Réalisez des prototypes virtuels, des optimisations de paramètres et d’autres analyses avec Mathematica.
Commande par inversion de modèle d’un crabe de levage
Les modèles peuvent être d’une grande utilité lors de la conception de contrôleurs. Dans cet exemple, un modèle de crabe de levage est utilisé pour démontrer l’application de la commande par inversion de modèle dans le contrôle de systèmes non linéaires.
Pour exécuter cet exemple, il vous faut
les dernières versions de System Modeler et Mathematica.
Veuillez choisir :
Obtenirun essai gratuit Continuer
le téléchargement
Le système
Les crabes de levage sont couramment utilisés dans les ponts roulants pour transporter le palan et sa charge potentielle sur la travée du pont. Lors du déplacement du crabe, il est important d’empêcher la charge de se balancer, car cela pourrait endommager non seulement le pont et la charge, mais aussi les équipements et les matériaux environnants.

Le modèle et le contrôleur
Le modèle de crabe comprend un crabe se déplaçant horizontalement et étant relié à une corde porteuse. On utilise la commande par inversion du modèle pour calculer la force nécessaire pour déplacer le crabe et la charge jusqu’à une certaine position horizontale spécifiée.
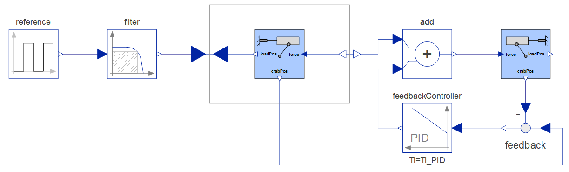
On utilise le bloc Modelica.Blocks.Math.InverseBlockConstraints pour inverser le modèle de crabe et de charge en connectant simplement ses entrées et ses sorties. Le contrôleur lui-même se compose d’un signal de référence qui spécifie la position désirée de la charge, d’un filtre, du modèle inversé et enfin d’un contrôleur de retour, qui dans ce cas est un régulateur PID.
Résultats de la simulation
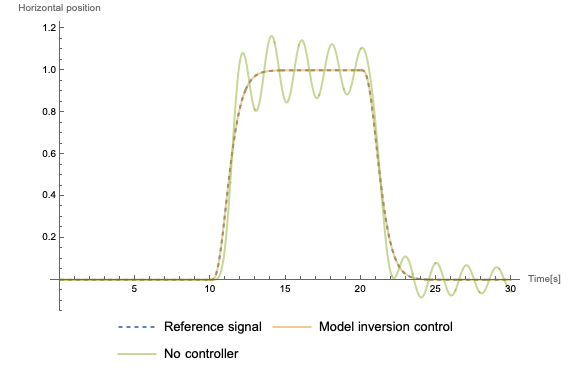
La position horizontale de la charge avec et sans l’utilisation du contrôleur. Si nous déplacions le crabe en nous basant uniquement sur la position de référence, la charge commencerait à osciller. Cependant, l’utilisation du contrôleur permet d’annuler les oscillations et de déplacer la charge rapidement et avec précision, en suivant de près le signal de référence.
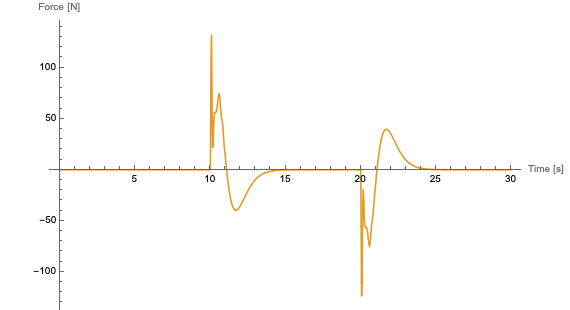
Le signal de commande (force d’entrée) utilisé par le contrôleur pour déplacer le crabe et la charge dans les positions souhaitées. Le signal est basé à la fois sur le modèle inversé et sur le contrôleur de rétroaction.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »