1311 videos match your search.
 |
Christian Pasquel |
 |
Jessica Sudo |
 |
Sandipan Bandyopadhyay Wolfram Mathematica can be very helpful to Robotics teachers or a researchers. I developed several symbolic codes to solve benchmark problems in the field of parallel manipulators, and created computational ... |
 |
Adam Strzebonski |
 |
Roger Germundsson This talk introduces the new geometry functionality in Mathematica 10. |
 |
Adam Strzebonski Recent releases of Mathematica have significantly extended the exact global optimization capabilities, and more optimization methods are currently under development. In this talk, Adam Strzebonski shows some examples of Wolfram ... |
 |
Devendra Kapadia |
 |
Unal Goktas This talk by Unal Goktas presents an overview of solution methods for partial differential equations (PDEs) in the Wolfram Language. It covers not only the classical methods but also relatively ... |
 |
Jan Brugard, Patrik Ekenberg |
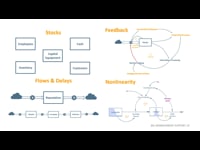 |
Guido Wolf Reichert This talk provides a quick tour of the new Business Simulation library (BSL) available in Wolfram System Modeler. BSL employs a-causal "physical" connectors to enable very compact and convenient model ... |
 |
Ankit Naik This presentation from Ankit Naik focuses on how System Modeler is used to make teaching come alive. There is an overview of Wolfram Virtual Labs included. |
 |
Patrik Ekenberg, Wolfram MathCore |
 |
Johan Rodin, Anneli Mossberg, and Leonardo Laguna-Ruiz This talk demonstrates how models interact with other software and hardware components, how models are exported from SystemModeler and used in other systems based on the functional mock-up interface (FMI), how Modelica libraries interface with hardware, and ... |
 |
Ankit Naik |
 |
Jan Brugard & Patrik Ekenberg |
 |
Ankit Naik |
 |
Jan Brugard |
 |
Patrik Ekenberg |
 |
Malte Lenz |
 |
Patrik Ekenberg |
