고유 함수의 시각화
3D 라플라스 연산자를 정의합니다.
In[1]:=
\[ScriptCapitalL] = -Laplacian[u[x, y, z], {x, y, z}];동차 Dirichlet 경계 조건을 지정합니다.
In[2]:=
\[ScriptCapitalB] = DirichletCondition[u[x, y, z] == 0, True];구체상의 최소 고유값과 고유 함수를 구합니다.
In[3]:=
\[CapitalOmega] = Ball[{0, 0, 0}, 2];
{vals, funs} =
DEigensystem[{\[ScriptCapitalL], \[ScriptCapitalB]},
u[x, y, z], {x, y, z} \[Element] \[CapitalOmega], 2];In[4]:=
funsOut[4]=

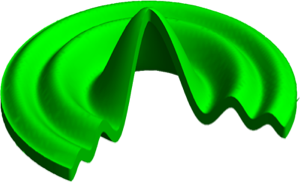
3D 밀도 플롯을 사용하여 각 고유 함수를 플롯합니다.
In[5]:=
Table[DensityPlot3D[
Evaluate[N[f]], {x, y, z} \[Element] \[CapitalOmega],
PlotTheme -> "NoAxes", PlotLegends -> Placed[Automatic, Below]], {f,
funs}]Out[5]=

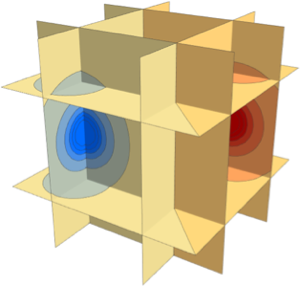
좌표 평면을 사용하여 밀도를 플롯합니다.
In[6]:=
Table[SliceDensityPlot3D[
Evaluate[N[f]], {x, y, z} \[Element] \[CapitalOmega],
PlotLegends -> Placed[Automatic, Below]], {f, funs}]Out[6]=