Application Areas
Build Regulators and Observers for Systems
The trajectories of the states and a Luenberger observer's state estimates.
| In[1]:= | 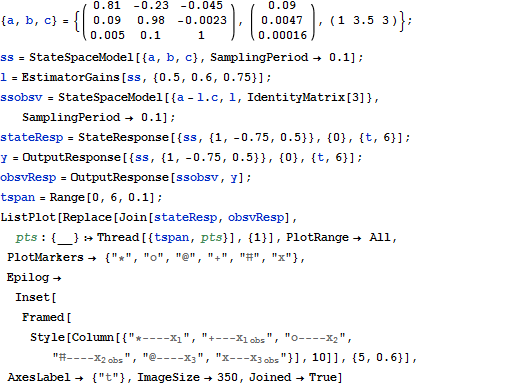 X |
| Out[1]= | 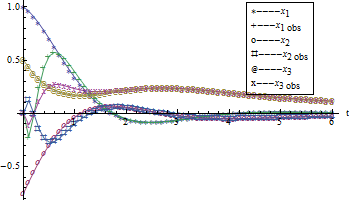 |
| New in Wolfram Mathematica 8: Integrated Control Systems Design | ◄ previous | next ► |
| In[1]:= | X |
| Out[1]= | |