Application Areas
Specify Models of Linear, Time-Invariant Systems in Natural Form
The linearized state-space model of an inverted pendulum is generated from the underlying equations of motion and typeset in a natural traditional form.
| In[1]:= | 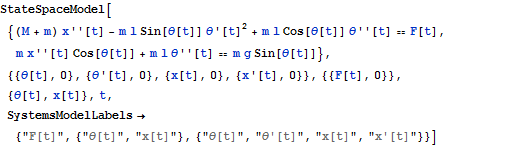 X |
| Out[1]= | 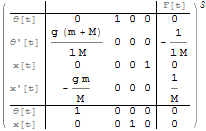 |