Áreas de Aplicação
Especifique modelos de sistemas lineares, que não variem com o tempo de forma natural
O modelo linearizado de estado-espaço de um pêndulo inverso é gerado a partir das equações subjacentes do movimento e digitadas em um formato tradicional natural.
| In[1]:= | 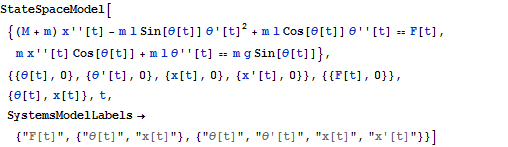 X |
| Out[1]= |  |