Slider-Crank Mechanism
| In[7]:= |  X |
| In[8]:= |  X |
| In[9]:= |  X |
| In[10]:= |  X |
| In[11]:= | 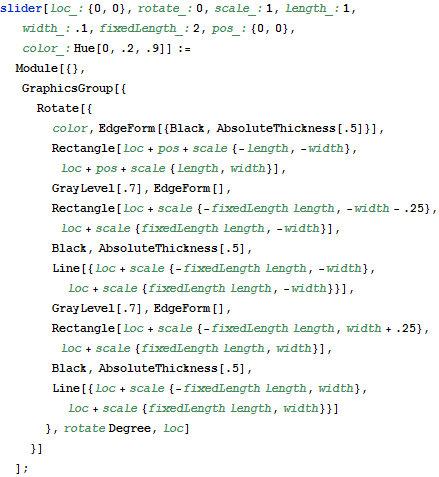 X |
| In[12]:= | 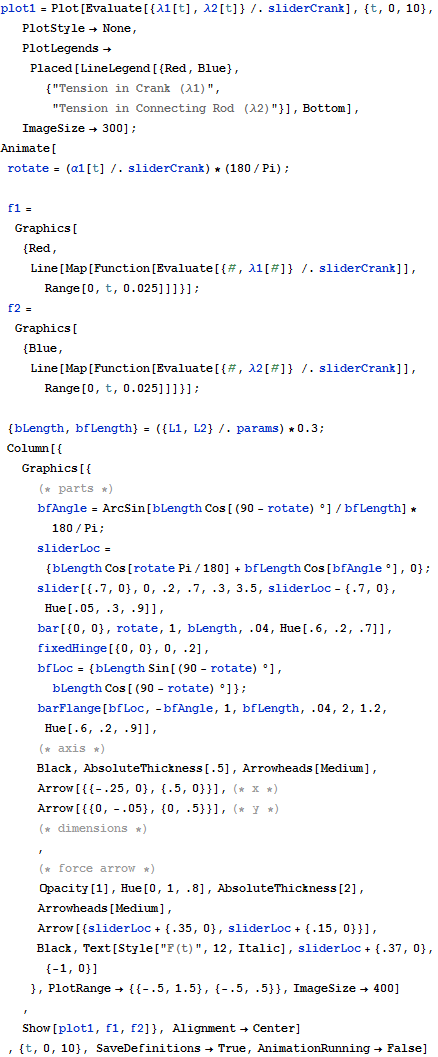 X |
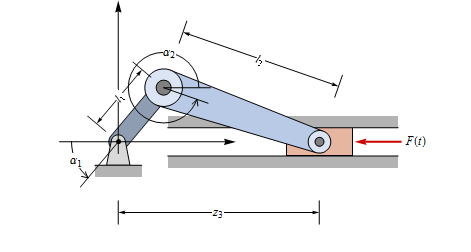
Model the motion of a simple slider-crank mechanism subject to an external force.
 X |
The state of the slider-crank mechanism can be described completely by two angles  1, 2 and the distance
1, 2 and the distance  of the slider from origin.
of the slider from origin.
| In[1]:= | X |
Define the force that is exerted on the slider.
| In[2]:= | X |
The equations of motion are derived by resolving the forces and applying Newton's law  and
and  . The crank and connecting rod have mass and therefore inertia.
. The crank and connecting rod have mass and therefore inertia.
| In[3]:= | 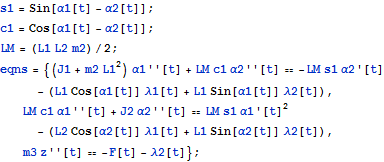 X |
The algebraic equations define the geometry of the system.
| In[4]:= | X |
Define the physical parameters for the system. Here  and
and  are the moment of inertia.
are the moment of inertia.
| In[5]:= | X |
Solve and visualize the system.
| In[6]:= |  X |
Play Animation » Stop Animation »  |