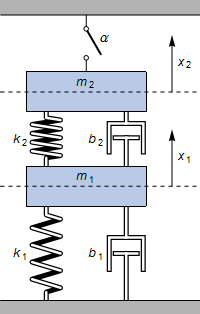
A Mechanical System with Algebraic Constraints
This mass-spring-damper system includes a rigid bar that can prevent the motion of the second mass.
 |
| In[1]:= | 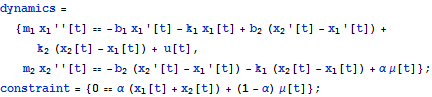 X |
Obtain a StateSpaceModel representation.
| In[2]:= |  X |
| Out[2]= |  |
Use OutputResponse to simulate the system both when the bar is locked and when it is unlocked.
| In[3]:= |  X |
| In[4]:= | X |
| Out[4]= |  |
| In[5]:= | X |
| Out[5]= |  |