Control an RLC Circuit Modeled as a Descriptor System
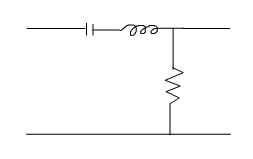
This resistor-inductor-capacitor circuit can easily be modeled from the component equations using a descriptor state-space model.
 |
| In[1]:= |  X |
| In[2]:= | X |
| Out[2]= | 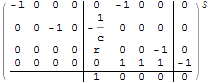 |
| In[3]:= | X |
| Out[3]= | 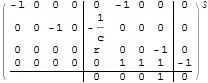 |
The magnitude response of the system should be reduced at the utility frequency.
| In[4]:= | X |
| In[5]:= | X |
| Out[5]= | 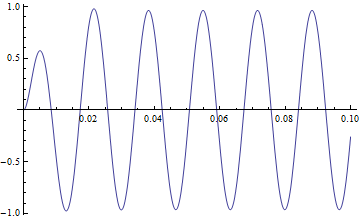 |
Find a controller to place the closed-loop poles at symbolic locations.
| In[6]:= | X |
Find the responses when the poles are moved away from the origin along each axis.
| In[7]:= | X |
| Out[7]= |
| In[8]:= |  X |
Moving the poles either further to the left or away from the real axis decreases the magnitude response.
| In[9]:= |  X |
| Out[9]= | 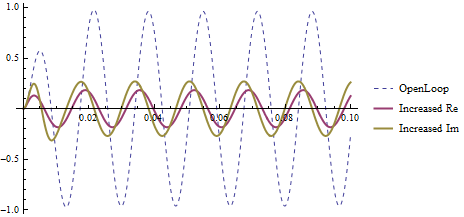 |