Overshoot Reduction with PID Feedforward Filtering
Smaller values of the feedforward proportional weight result in lower overshoot without affecting the settling time.
The UnitStep reference response with different values of the proportional weight b.
| In[1]:= |  X |
| In[2]:= |  X |
| Out[2]= | 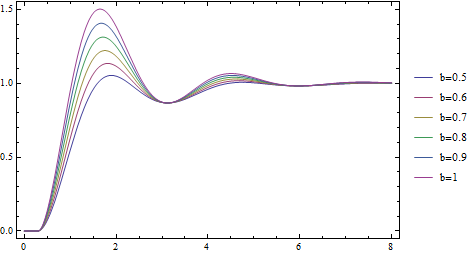 |