Closed-Loop Responses with a PID Controller
 |
Plot the output and control responses for different exogenous inputs.
| In[1]:= | X |
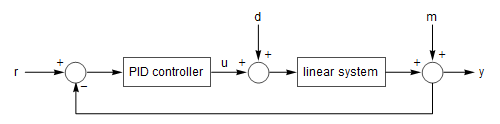
The output and and control responses for a SquareWave process disturbance.
| In[2]:= |  X |
| In[3]:= | X |
| Out[3]= | 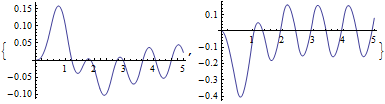 |
The output and control responses for a UnitBox reference.
| In[4]:= |  X |
| In[5]:= | X |
| Out[5]= | 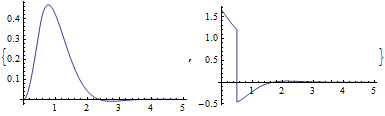 |
The output and control responses for a ramp sensor noise.
| In[6]:= |  X |
| In[7]:= | X |
| Out[7]= | 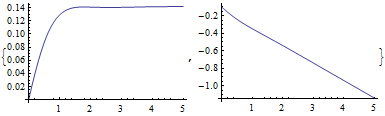 |