| New in Wolfram Mathematica 6: Integrated Geometric Computing | ◄ previous | next ► |
Compute Geometric Transforms Symbolically
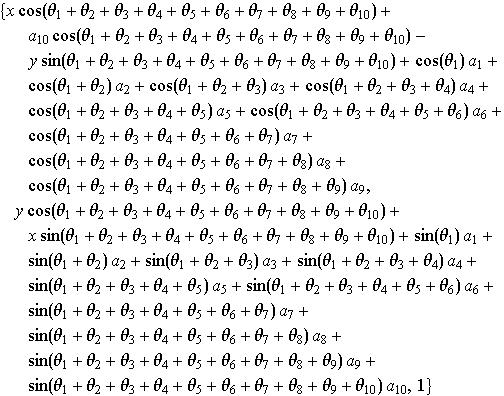
Mathematica 6 makes it easy to combine geometric transforms in any number of dimensions—here to compute the motion of a 10-segment planar robot arm.
In[1]:= |  Simplify[Apply[Composition,
Table[Composition[RotationTransform[Subscript[\[Theta], i]],
TranslationTransform[{Subscript[a, i], 0}]], {i, 10}]][{x,
y}]] // TraditionalForm |
Out[1]//TraditionalForm= | |
 | |