Movimiento vertical de un dron
Mida automáticamente el rendimiento de un sistema controlado, como el tiempo de subida, el tiempo de asentamiento, el sobreimpulso y más. En este ejemplo, puede observar el ascenso, descenso y movimiento de suspensión de un dron.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
Modelo del dron
El chasis y las hélices del dron se modelan utilizando componentes incorporados. Los ángulos y la altura se controlan mediante controladores PID.
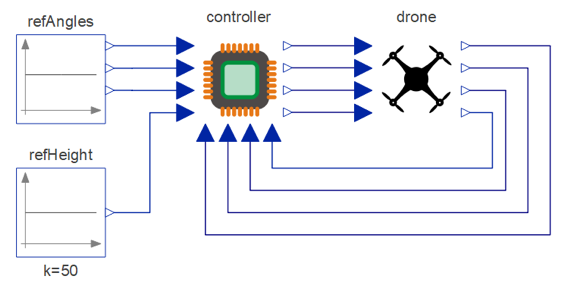
El cuerpo del dron está conectado a un controlador PID. El balanceo, cabeceo y guiñada se establecen en 0 grados. La altura se establece en 50 m.
Revise el rendimiento del sistema controlado
Mida automáticamente el rendimiento del sistema controlado usando Wolfram Language.
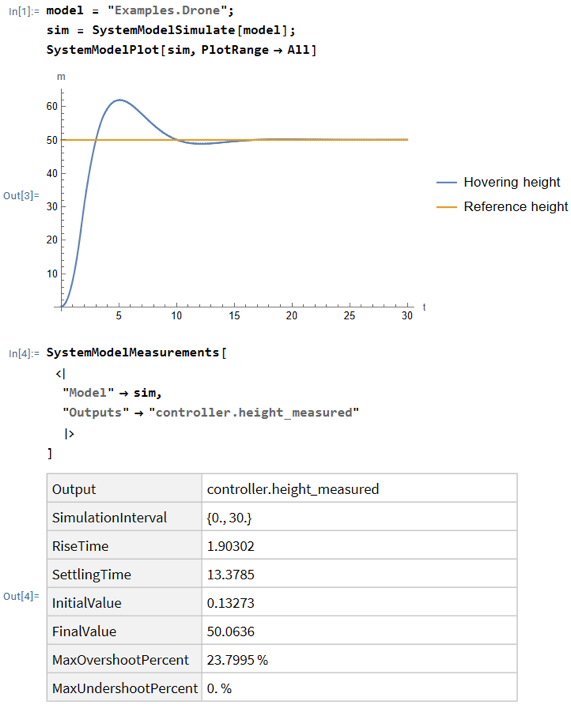
Le tomó al dron 13.38 segundos alcanzar una altura de 50 m con un sobreimpulso del 23.8 %.
Compare escenarios
Pruebe la respuesta para diferentes ganancias de controlador PID y calcule el rendimiento del controlador para un intervalo personalizado.
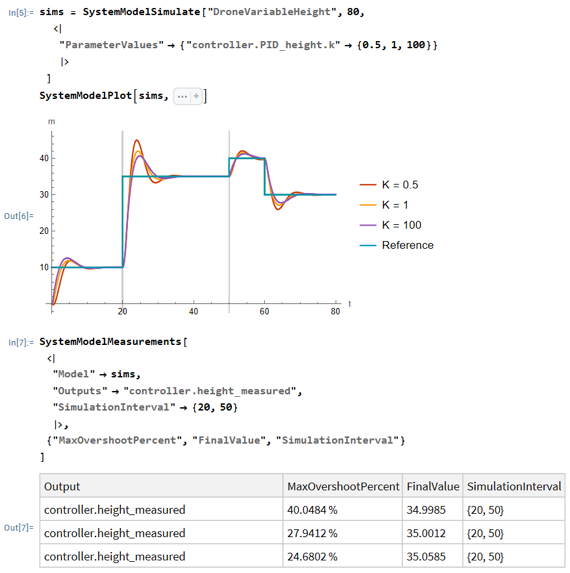
Una ganancia de 100 (curva morada) tiene el menor sobreimpulso.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »