ドローンの垂直運動
立ち上がり時間,整定時間,オーバーシュート等の制御対象の性能を自動的に測定します.この例ではドローンの上昇,降下,ホバリングを観察することができます.
ドローンのモデル
組込みコンポーネントを使って,ドローンのシャーシとプロペラをモデル化します.角度と高さはPID制御器を使って制御します.
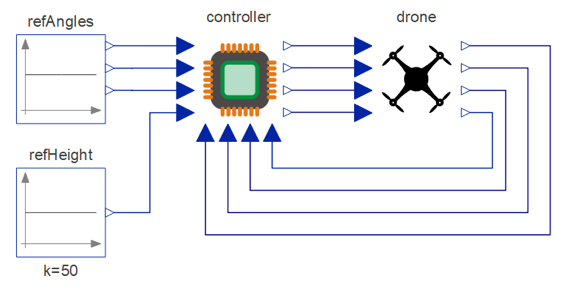
ドローンの本体はPID制御器に接続されています.ロール,ピッチ,ヨーは0度に,高さは50mに設定されます.
制御されたシステムの性能をチェックする
Wolfram言語を使って,制御されたシステムの性能を自動的に測定します.
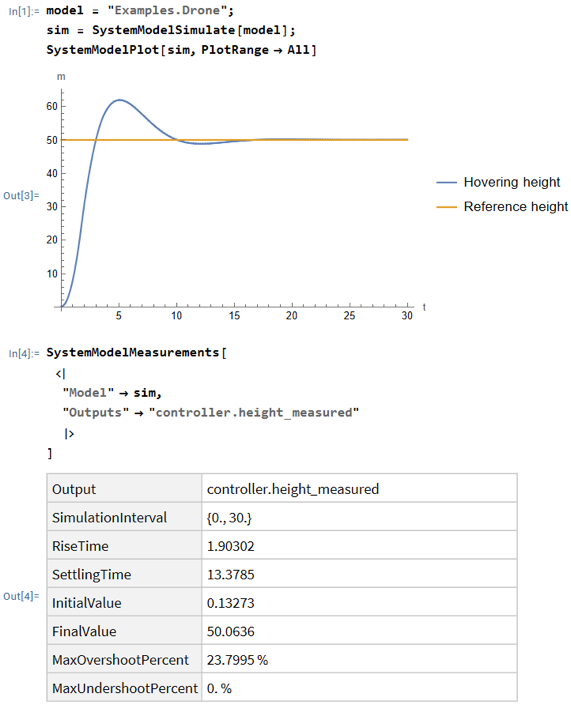
このドローンは23.8 %のオーバーシュートで13.38秒で高さ50mに到達した.
さまざまな設定の比較
PID制御器のさまざまなゲインに対する応答をテストし,カスタムの間隔での制御器の性能を計算します.
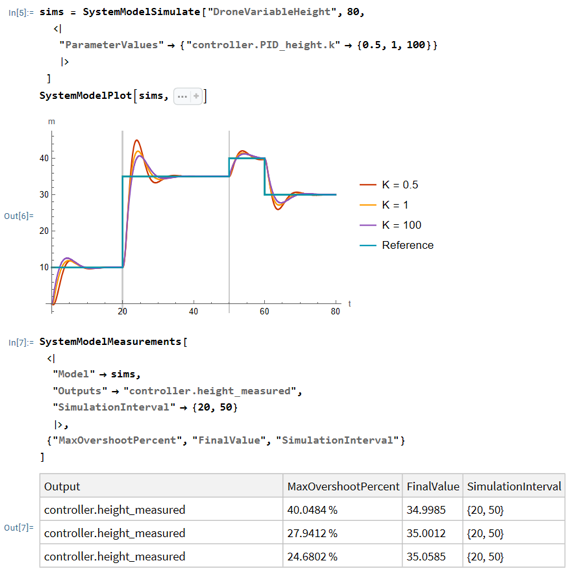
ゲイン100(紫の曲線)のオーバーシュートが最低になっている.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »