Génie aérospatial
Élaborez et analysez des modèles d’avions, de fusées, de drones et de satellites. Concevez et optimisez les systèmes de guidage, de navigation et de commande (GNC).
Mouvement vertical d’un drone
Mesurez automatiquement les performances d’un système contrôlé, telles que le temps de montée, le temps de stabilisation, le dépassement, etc. Dans cet exemple, vous pouvez observer le mouvement de montée, de descente et de vol stationnaire d’un drone.
Pour exécuter cet exemple, il vous faut
les dernières versions de System Modeler et Mathematica.
Veuillez choisir :
Obtenirun essai gratuit Continuer
le téléchargement
Modèle du drone
Le châssis et les hélices du drone sont modélisés à l’aide de composantes intégrées. Les angles et la hauteur sont contrôlés à l’aide de régulateurs PID.
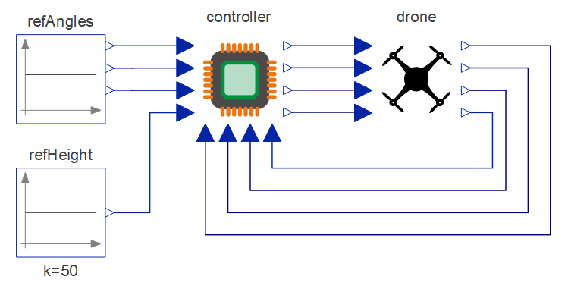
Le corps du drone est connecté à un régulateur PID. Le roulis, le tangage et le lacet sont réglés à 0 degré. La hauteur est fixée à 50 m.
Vérifiez les performances du système contrôlé
Mesurez automatiquement les performances du système contrôlé à l’aide de Wolfram Language.
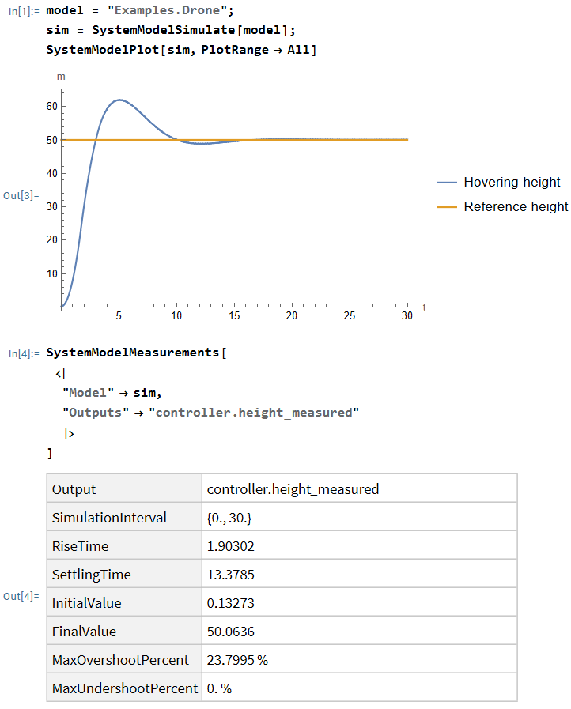
Le drone a mis 13,38 secondes pour atteindre une hauteur de 50 m avec un dépassement de 23,8 %.
Comparez les scénarios
Testez la réponse pour différents gains du régulateur PID et calculez les performances du régulateur pour un intervalle personnalisé.
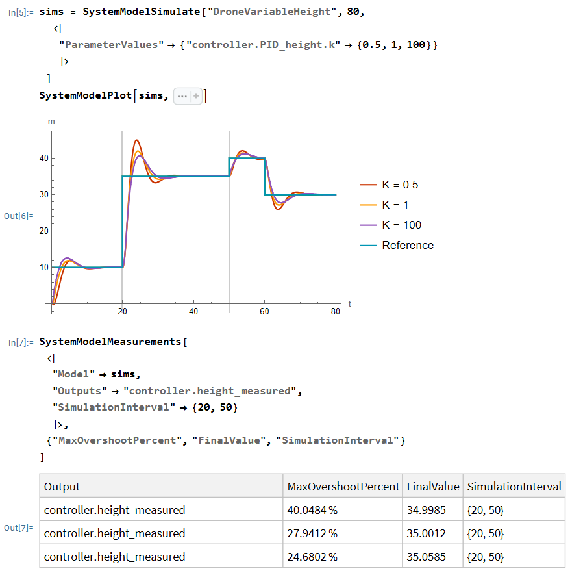
Un gain de 100 (courbe violette) présente le dépassement le plus faible.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »