Unidad de mezcla controlada
Un problema de control importante es diseñar controladores para sistemas no lineales utilizando control por inversión de modelo. El siguiente ejemplo utiliza un componente InverseBlockConstraints para construir modelos inversos fácilmente. También emplea la biblioteca Modelica_Synchronous para discretizar automáticamente el controlador feedforward no lineal de tiempo continuo.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
El modelo
Este modelo controla la concentración del reactivo en una unidad de mezcla. En presencia de un catalizador, el reactivo se divide en varios productos base que se eliminan continuamente del tanque. Dado que es una reacción exotérmica, el reactor de mezcla se enfría con un medio de enfriamiento. La temperatura de enfriamiento es la señal principal de actuación y la concentración del reactivo es la señal controlada.
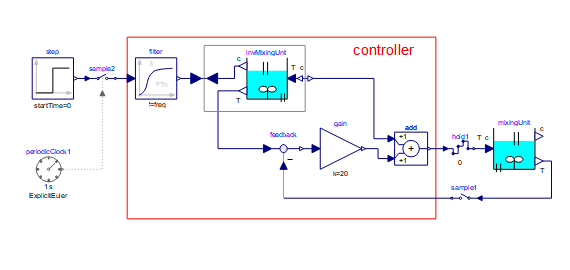
Controlador de datos muestreados para la unidad de mezcla, incluyendo el modelo inverso de planta.
Análisis
El sistema general presenta un buen comportamiento de control, ya que la concentración del reactivo en la unidad de mezcla sigue la señal deseada.
Análisis
Use el controlador feedforward no lineal para diseñar la región de operación completa de una planta.
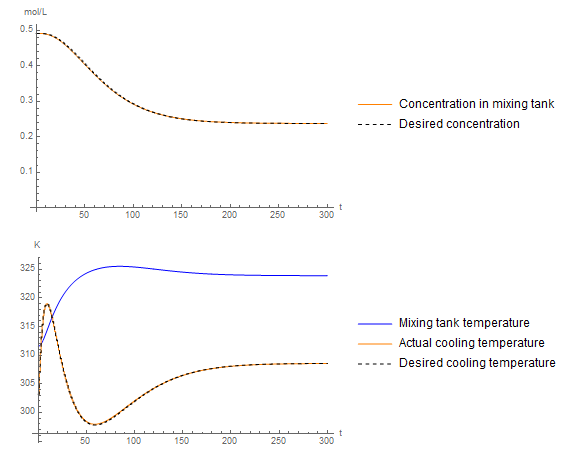
Resultados de simulación.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »