機械工学
SystemModelerを使うと,運動学的挙動,動的挙動,熱挙動を伴うメカニズムや機械を含む動力学問題をモデル化し,シミュレーションを実行することができます.振動問題を調べ,解決します.
DC Motor: Real‐Time Simulation
SystemModeler 4 gives users the possibility to control simulations directly from Mathematica. This example shows how a DC motor reacts to inputs from a user in real time.
DC Motor Model
The physical model is a model of a DC motor, combining electrical and mechanical elements. The speed is read by a sensor, and the output is fed back to the user.
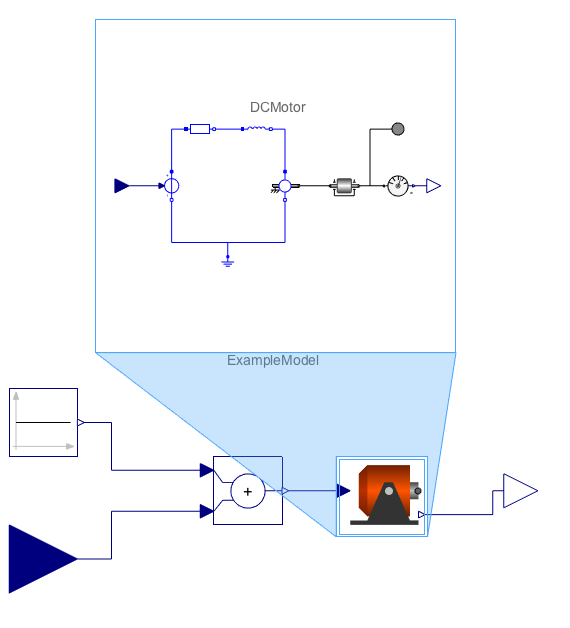
The motor starts with zero initial speed, and the motor then tries to adjust to the constant speed input, one, as fast as possible. The user input to the system is then added to the reference speed, and the motor will try to adjust to the reference speed.
The model of the motor is easily connected to inputs from Mathematica with the real‐time interface.
A dynamic input variable is provided to the simulation and is visualized in real time, together with the output from the experiment.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »