Control por inversión de modelo de un polipasto de cangrejo
Los modelos pueden ser de gran utilidad al diseñar controladores. En este ejemplo, se utiliza un modelo de un polipasto de cangrejo para demostrar la aplicación del control por inversión de modelos en el control de sistemas no lineales.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
El sistema
Los polipastos de cangrejo se usan comúnmente en grúas puente para transportar el polipasto y su posible carga a lo largo del puente. Al mover el cangrejo, es importante evitar que la carga se balancee, ya que esto podría causar daños no solo a la grúa y la carga, sino también al equipo y materiales en los alrededores.

El modelo y el controlador
El modelo de cangrejo incluye un cangrejo o carro que se mueve horizontalmente conectado a una cuerda portadora de carga. Se utiliza control por inversión de modelos para calcular la fuerza necesaria para mover el cangrejo y la carga a una posición horizontal especificada.
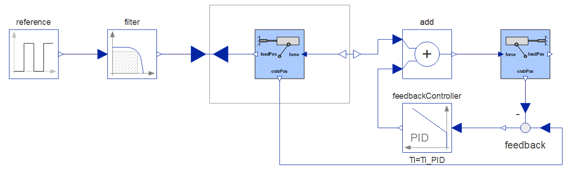
Se utiliza Modelica.Blocks.Math.InverseBlockConstraints para invertir el modelo del cangrejo y carga simplemente conectando sus entradas y salidas. El controlador en sí consta de una señal de referencia que especifica la posición de carga deseada, un filtro, el modelo invertido y finalmente un controlador de retroalimentación, que en este caso es un regulador PID.
Resultados de la simulación
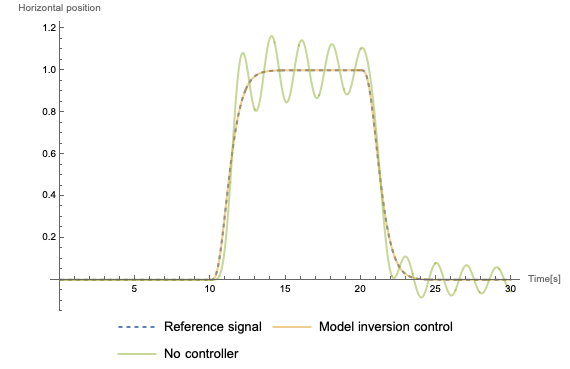
La posición horizontal de la carga con y sin el uso del controlador. Si moviéramos el cangrejo únicamente en base a la posición de referencia, la carga comenzaría a balancearse. Sin embargo, al utilizar el controlador, se pueden cancelar las oscilaciones y mover la carga de forma rápida y precisa, siguiendo de cerca la señal de referencia.
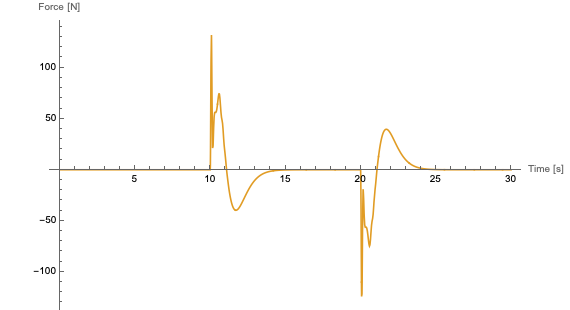
La señal de control (fuerza de entrada) utilizada por el controlador para mover el cangrejo y la carga a las posiciones deseadas, la cual se basa tanto en el modelo invertido como en el controlador de retroalimentación.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »