Física
Amplíe el plan de estudios con experimentos emocionantes en dinámica y obtenga una mejor comprensión sobre cómo el modelado y la simulación pueden mejorar y fortalecer la comprensión en conceptos de física y matemáticas.
Balancing Ball
This model studies a ball rolling on top of a beam. The ball translational acceleration will be dependent on how the beam is angled. In this example, two different control schemes are studied, the PID regulator and the LQ regulator, which can be used to control the position of the ball along the beam, using the beam angle as input.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
The Model
Gravity acts on the ball, providing a downward force that is proportional to the mass of the object. When the beam is perpendicular to the gravitational force, parallel to the ground, the normal force exactly cancels out the gravitational force and no acceleration is applied to the ball. By carefully setting the angle of the beam, the position of the ball along the beam can be controlled. The model can be used to try out different methods for controlling the position of the ball, both in simulation and with real-time connection to hardware.
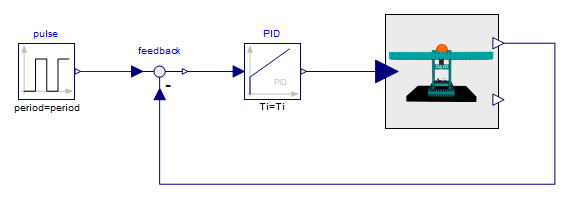
The angle of the beam is controlled precisely by a servo. On either side of the beam is a bumper that will stop the ball from rolling off of the beam. The model contains multibody objects onto which custom CAD models have been loaded to visualize the system.
Visualization
Since the model is built in SystemModeler using the MultiBody library, an animation of the model is generated automatically. Custom CAD models have been loaded onto the objects to give an accurate representation of the real-world system.
Output from the model is used to control the real-world system, and input from the real-world system is used to animate the model.
Controller Design
Use the Wolfram Language together with SystemModeler to design a controller for the hardware, based on the model.

The Wolfram Language can automatically linearize system models, which can in turn be used for pole placement for PID controllers and calculate gains for LQ regulators.
With the controllers constructed, you can easily connect the controller to either the software model or custom hardware, using the ModelPlug library, and compare how the controllers perform.
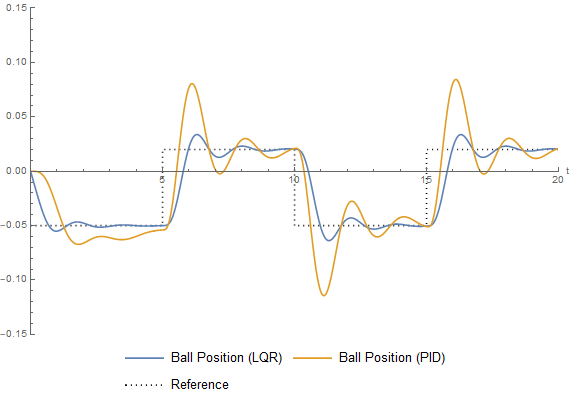
Design & Compare
Use the Wolfram Language to design controllers and compare their output.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »