Physique
Élargissez le programme scolaire grâce à des expériences passionnantes dans le domaine de la dynamique et découvrez comment la modélisation et la simulation peuvent améliorer et renforcer la compréhension des concepts de physique et de mathématiques.
Balle en équilibre
Pour exécuter cet exemple, il vous faut
les dernières versions de System Modeler et Mathematica.
Veuillez choisir :
Obtenirun essai gratuit Continuer
le téléchargement
Le modèle
La gravité agit sur la balle en exerçant une force vers le bas proportionnelle à la masse de l’objet. Lorsque la poutre est perpendiculaire à la force gravitationnelle, c’est-à-dire parallèle au sol, la force normale annule exactement la force gravitationnelle et aucune accélération n’est appliquée à la balle. En réglant soigneusement l’angle de la poutre, il est possible de contrôler la position de la balle le long de la poutre. Le modèle peut être utilisé pour tester différentes méthodes de commande de la position de la balle, à la fois en simulation et avec une connexion en temps réel au matériel.
Visualisation
Comme le modèle est construit dans System Modeler à l’aide de la bibliothèque MultiBody, une animation du modèle est générée automatiquement. Des modèles CAO personnalisés ont été chargés sur les objets pour donner une représentation précise du système du monde réel.
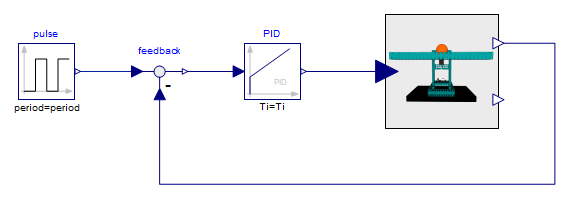
Conception du contrôleur
Utilisez Wolfram Language avec System Modeler pour concevoir un contrôleur pour le matériel, basé sur le modèle.

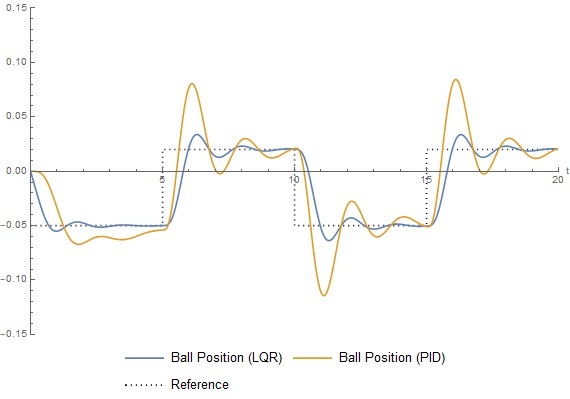
Conception et comparaison
Utilisez Wolfram Language pour concevoir des contrôleurs et comparer leur sortie.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »