Physique
Élargissez le programme scolaire grâce à des expériences passionnantes dans le domaine de la dynamique et découvrez comment la modélisation et la simulation peuvent améliorer et renforcer la compréhension des concepts de physique et de mathématiques.



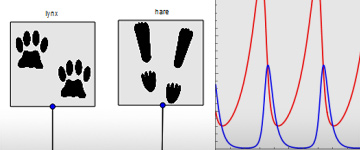
Lotka–Volterra
Le modèle classique de Lotka–Volterra a été proposé à l’origine pour expliquer les variations des populations de poissons en Méditerranée, mais il a depuis été utilisé pour expliquer la dynamique de tout système prédateur-proie dans lequel certaines hypothèses sont valables. Ici, à l’aide de System Modeler, on explore les oscillations du lièvre d’Amérique et du lynx.


Bras robotique Arduino
La bibliothèque Model Plug de Wolfram vous permet de connecter vos modèles de simulation au monde réel à l’aide de cartes Arduino, augmentant ainsi la capacité de prototypage rapide dans System Modeler. Nous montrons ici comment on peut utiliser Model Plug pour contrôler de manière interactive un bras de robot à partir d’un panneau de commande.

Précession gyroscopique
Les effets gyroscopiques ont été une source d’ingénierie étonnante et d’amusement pour de nombreuses personnes. Ce phénomène affecte une grande variété d’applications. La plus évidente est sans doute l’hélicoptère, qui se comporte d’une manière tout à fait surprenante. Dans cet exemple, on explore le concept de précession gyroscopique.
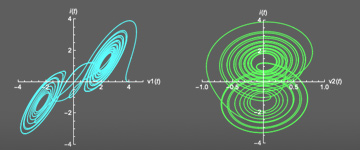
Théorème de la raquette de tennis (effet Dzhanibekov)
Le théorème de la raquette de tennis ou l’effet Dzhanibekov stipule que pour un corps rigide avec trois moments d’inertie uniques, la rotation autour de l’axe intermédiaire est instable, tandis que la rotation autour des deux autres axes est stable. Vous pouvez voir ce théorème en action dans cet exemple d’écrou à ailettes.

Physique des trampolines
Un trampoline est un appareil récréatif constitué d’une toile tendue entre un cadre en acier, à l’aide de nombreux ressorts. Cependant, son utilisation peut être dangereuse si la personne qui saute perd le contrôle et tombe. Dans cet exemple, vous analyserez la dynamique de la personne qui saute en changeant différents paramètres tels que le poids de la personne, l’inclinaison du sol et la vitesse initiale de la personne qui saute.

Physique des trains
Lorsqu’un train se déplace, les forces agissant entre les wagons lors du freinage sont très importantes. Cela entraîne l’usure, voire la rupture, des attelages entre les wagons. Dans cet exemple, vous examinerez différentes conceptions d’attelages et apprendrez ainsi à connaître les systèmes de ressorts et d’amortisseurs.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »