Falla de motor de una aeronave
¿Cómo se comportaría una aeronave en caso de una falla como un motor defectuoso, un mal funcionamiento de los flaps o una lógica de control defectuosa? Este ejemplo modela y simula la respuesta de una aeronave Hawker Siddeley luego de una falla en un motor.
Modelo de la aeronave
Se utiliza un modelo incorporado de un Hawker Siddeley HS-121 Trident 3B. Está conectado a un piloto automático que sigue una trayectoria de referencia. El Trident 3B tiene un diseño inusual, con un motor de refuerzo adicional más pequeño, el cual comienza a producir empuje cuando se excede un valor umbral de la demanda del acelerador. Aproximadamente a los 35 minutos, falla el motor izquierdo de la aeronave.
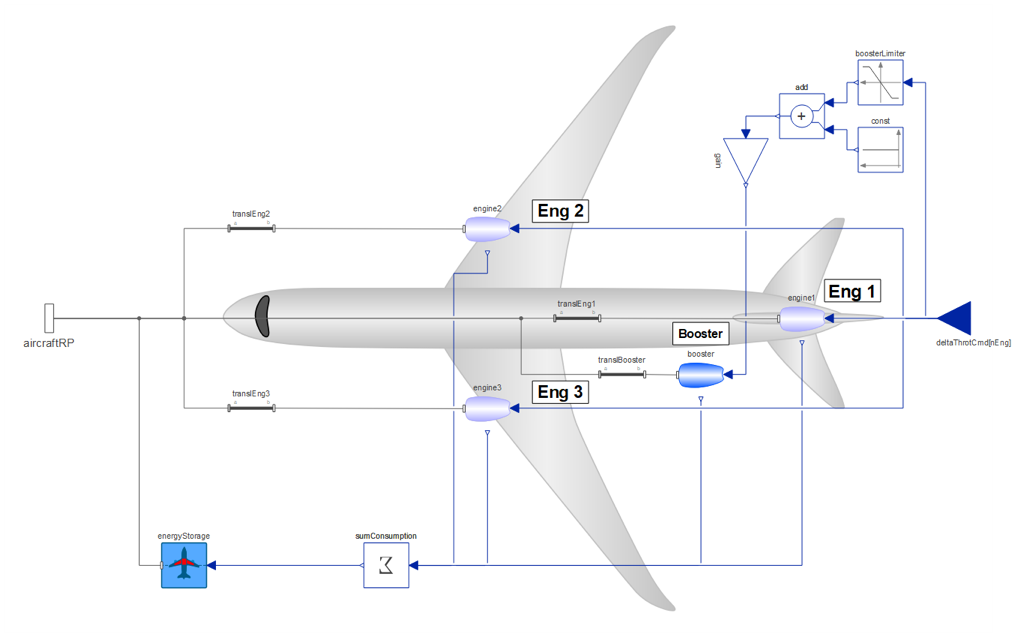
Se utiliza un modelo de una aeronave Hawker Siddeley HS-121 Trident 3B. Cuenta con dos motores turbofán montados en el fuselaje, así como un motor turbofán y un motor turborreactor de refuerzo montados en la cola vertical.
Controle la respuesta para el movimiento longitudinal tras la falla del motor
Tras la falla del motor izquierdo a los 35 minutos, todos los motores restantes funcionan a máxima potencia. Sin embargo, la aeronave no puede proporcionar suficiente empuje para mantener la velocidad indicada a la altitud de crucero, lo cual resulta en una desaceleración.
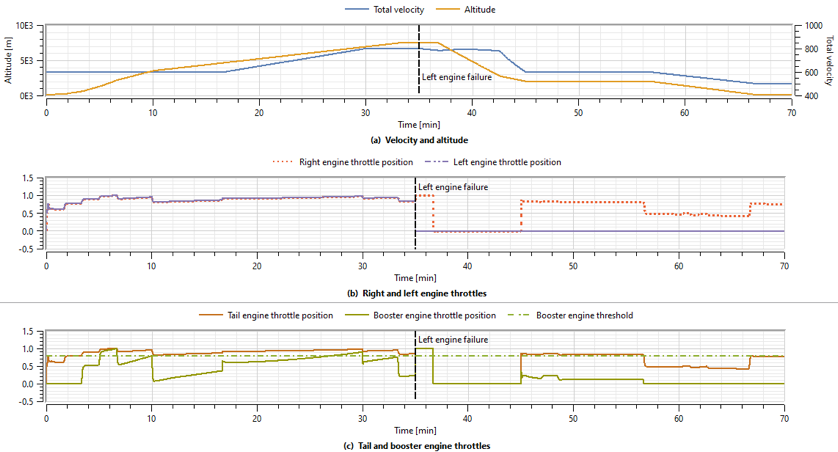
La representación superior muestra la velocidad y la altitud. La velocidad disminuye después de la falla del motor izquierdo, a pesar de que los motores restantes operan a máxima potencia. La representación intermedia muestra las posiciones del acelerador de los motores derecho e izquierdo. L a última representación muestra las posiciones del acelerador del motor de cola y del motor de refuerzo.
Controle la respuesta para el movimiento lateral tras la falla del motor
La representación superior muestra cómo el piloto automático comienza a aplicar tanto los alerones como el timón para compensar el momento de guiñada generado (debido al empuje diferencial justo después de la falla del motor izquierdo). Más adelante, durante la simulación, a medida que la aeronave ha descendido y desacelerado (hasta mantener un vuelo nivelado constante con los motores restantes), también se observa que tanto los alerones como el timón siguen desviados y la aeronave vuela con un pequeño ángulo de inclinación para poder volar en línea recta.
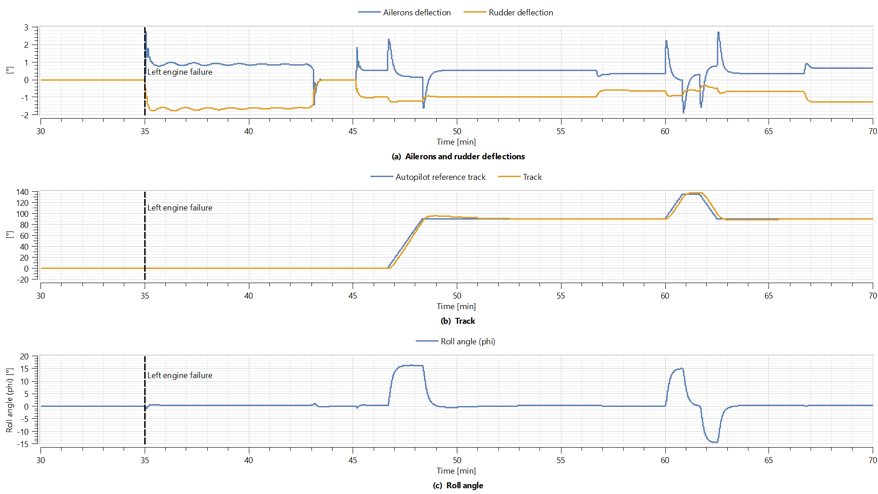
La representación superior muestra las desviaciones de los alerones y el timón. El momento de guiñada debido al empuje diferencial se compensa desviando los alerones y el timón. La representación intermedia muestra el ángulo de trayectoria de referencia proporcionado al piloto automático y el ángulo de trayectoria real. La aeronave puede tanto volar en línea recta como realizar giros utilizando el empuje diferencial después de la falla del motor izquierdo. La última representación muestra el ángulo de inclinación alrededor del eje x del fuselaje.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »