Aérospatiale et défense
Modélisez et testez des systèmes complexes tels que les véhicules aériens sans pilote (UAV), la robotique spatiale et la dynamique des avions. System Modeler permet de concevoir des systèmes et des composants et d’effectuer des tests et des vérifications en continu.
Panne de moteur d’un avion
Comment un avion se comporterait-il en cas de panne de moteur, d’un volet ou d’une logique de commande défectueuse ? Cet exemple modélise et simule la réaction d’un avion Hawker Siddeley après une panne de moteur.
Modèle d’un avion
On utilise le modèle intégré d’un Hawker Siddeley HS-121 Trident 3B. Il est connecté à un pilote automatique qui suit une trajectoire de référence. Le Trident 3B a une conception inhabituelle, avec un moteur d’appoint supplémentaire, plus petit, qui commence à produire de la poussée lorsqu’une valeur seuil de la demande de gaz est dépassée. Au bout d’environ 35 minutes, le moteur gauche de l’avion tombe en panne.
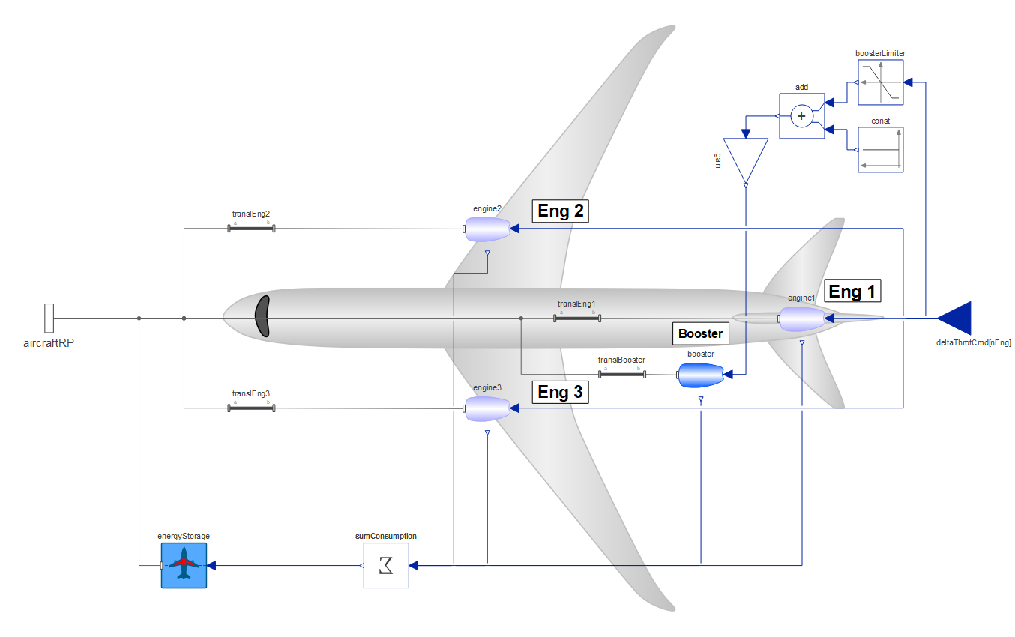
On utilise le modèle d’un avion Hawker Siddeley HS-121 Trident 3B. Il est équipé de deux turbosoufflantes montées sur le fuselage, et d’une turbosoufflante et d’un turboréacteur d’appoint montés sur l’empennage vertical.
Réponse de la commande pour le mouvement longitudinal après une panne de moteur
Après la panne du moteur gauche au bout de 35 minutes, tous les autres moteurs tournent à plein régime. Cependant, l’avion n’est pas en mesure de fournir une poussée suffisante pour maintenir la vitesse donnée à l’altitude de croisière, ce qui entraîne une décélération.
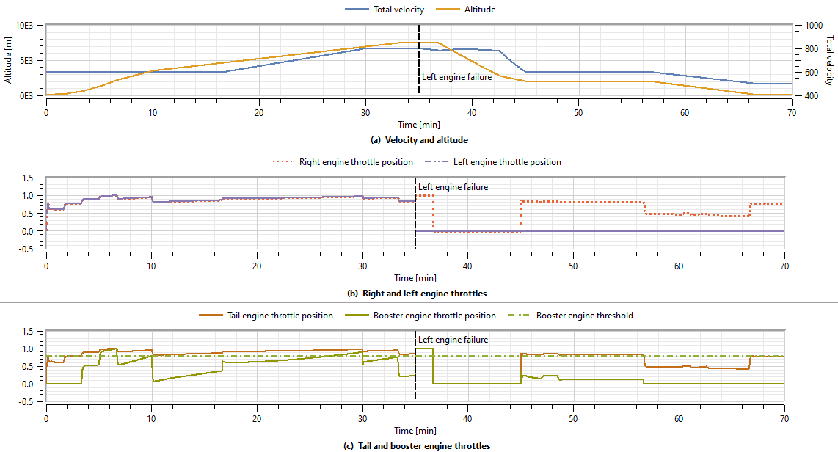
Le tracé du haut montre la vitesse et l’altitude. La vitesse chute après la panne du moteur gauche, bien que tous les moteurs restants soient à plein régime. Le tracé du milieu montre les positions des manettes des gaz des moteurs droit et gauche. Le dernier tracé montre les positions des gaz du moteur de queue et du moteur d’appoint.
Réponse de la commande au mouvement latéral après une panne de moteur
Le tracé du haut montre comment le pilote automatique commence à appliquer les ailerons et le gouvernail de direction pour compenser le moment de lacet généré (dû à la poussée différentielle juste après la panne du moteur gauche). Plus tard au cours de la simulation, lorsque l’avion est descendu et a décéléré (de manière à maintenir un vol stable en palier avec les moteurs restants), on peut également voir que les ailerons et le gouvernail sont toujours braqués et que l’avion vole avec un petit angle de roulis pour pouvoir se diriger en ligne droite.
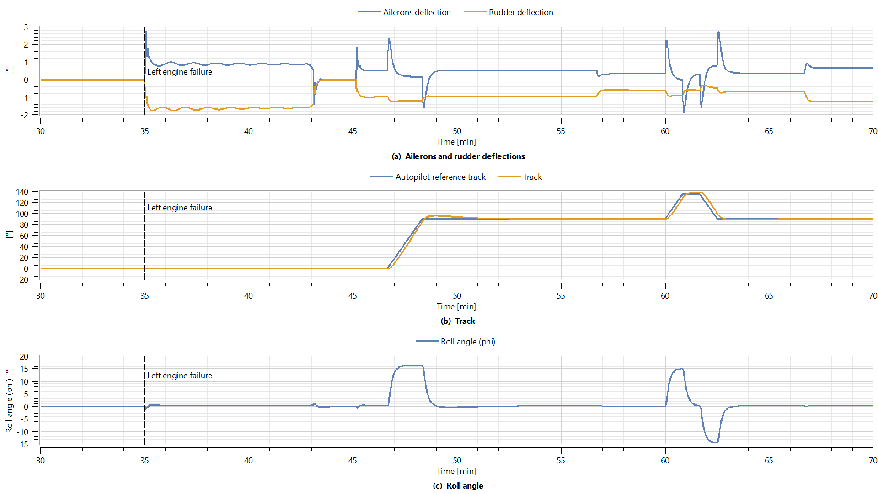
Le tracé du haut montre les déviations des ailerons et du gouvernail de direction. Le moment de lacet dû à la différence de poussée est compensé par le braquage des ailerons et du gouvernail de direction. Le tracé du milieu montre l’angle de trajectoire de référence donné au pilote automatique et l’angle de trajectoire réel. L’avion peut à la fois voler en ligne droite et effectuer des virages avec une poussée différentielle après la panne du moteur gauche. Le dernier tracé montre l’angle de roulis autour de l’axe x du corps.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »