Otros
Ejemplos de uso de un amplio rango de áreas de aplicación para aprender sobre modelado y simulación con System Modeler y el lenguaje Modelica.
Hovering Control of a Submarine
Hovering control aids in the maneuverability of underwater vehicles. This example shows how to create a controller that rejects disturbances and improves the stability of a submarine.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
Create a Model
Create a model of the submarine and its environment graphically or programmatically.
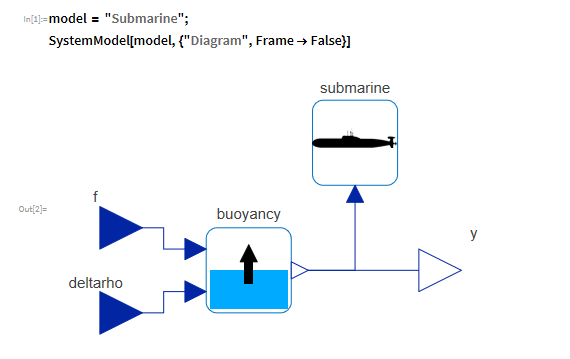
The submarine adjusts its hovering depth by varying its density. The density varies by adjusting the volume of water stored in the submarine’s ballast tanks.
Check the Response of the Uncontrolled System
Check the response of the uncontrolled submarine to an impulse-like disturbance.

The submarine oscillates around the equilibrium position and settles down in about one minute.
Design a Controller
Design a controller to dampen the oscillations of the submarine by choosing the eigenvalues of the response to be stable and well damped.
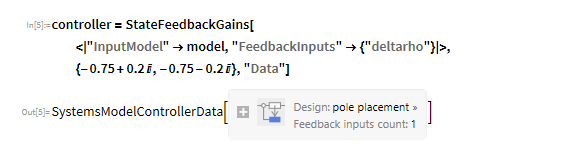
The closed-loop poles are placed to stabilize the system.
Connect the Controller
Create a controlled system by automatically connecting the controller to the model in a closed loop.
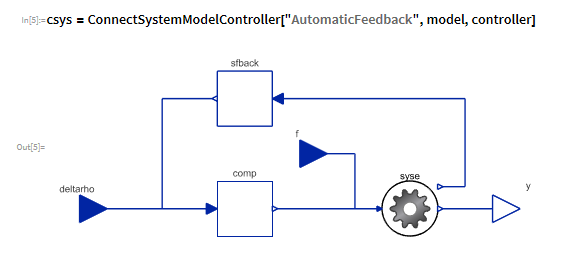
The submarine system is automatically connected to the controller.
Check the Response of the Controlled System
Check the response of the controlled submarine to the same disturbance.
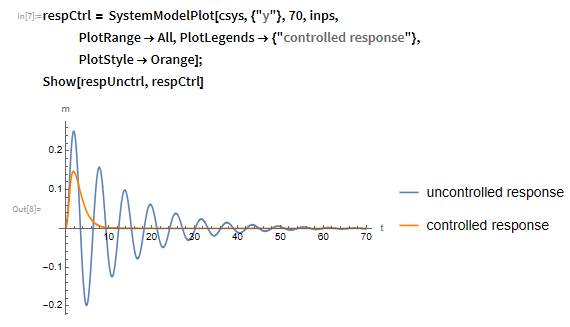
The controller stabilizes the submarine in about 10 seconds.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »