Autre
Utilisez des exemples provenant d’un large éventail de domaines d’application pour apprendre la modélisation et la simulation avec System Modeler et le langage Modelica.
Contrôle en vol stationnaire d’un sous-marin
Le contrôle en vol stationnaire améliore la manœuvrabilité des véhicules sous-marins. Cet exemple montre comment créer un contrôleur qui rejette les perturbations et améliore la stabilité d’un sous-marin.
Pour exécuter cet exemple, il vous faut
les dernières versions de System Modeler et Mathematica.
Veuillez choisir :
Obtenirun essai gratuit Continuer
le téléchargement
Créez un modèle
Créez un modèle du sous-marin et de son environnement avec des graphiques ou par programmation.
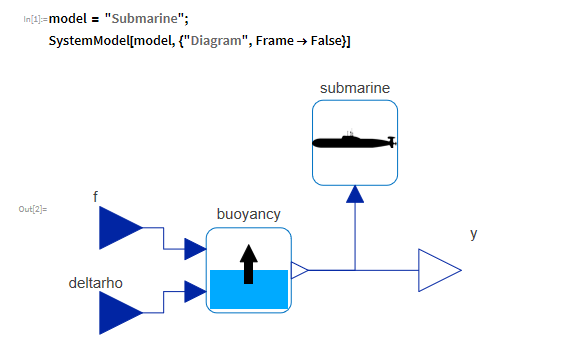
Le sous-marin ajuste sa profondeur de vol stationnaire en faisant varier sa densité. La densité varie en modifiant le volume d’eau stocké dans les réservoirs de ballast du sous-marin.
Vérifiez la réponse du système non contrôlé
Vérifiez comment un sous-marin non contrôlé répond à une perturbation de type impulsion.
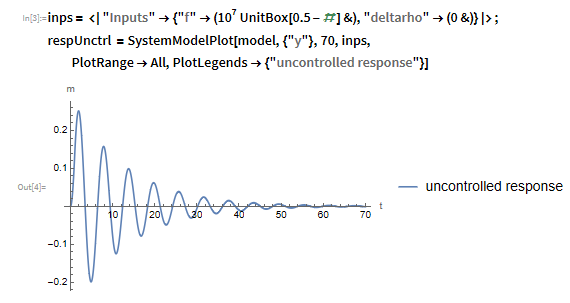
Le sous-marin oscille autour de la position d’équilibre et se stabilise en une minute environ.
Concevez un contrôleur
Concevez un contrôleur pour amortir les oscillations du sous-marin en choisissant les valeurs propres de la réponse pour qu’elles soient stables et bien amorties.
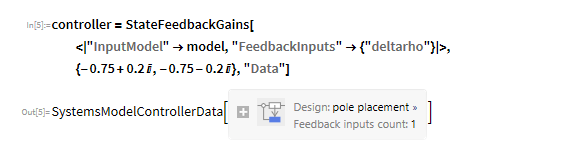
Les pôles en boucle fermée sont placés pour stabiliser le système.
Connectez le contrôleur
Créez un système contrôlé en connectant automatiquement le contrôleur au modèle dans une boucle fermée.
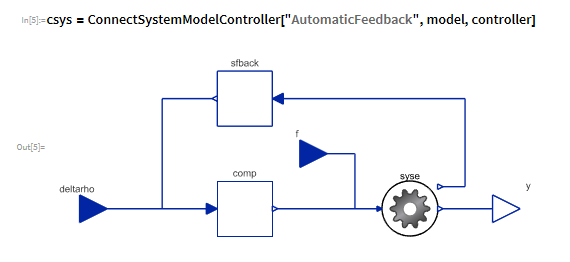
Le système du sous-marin est automatiquement connecté au contrôleur.
Vérifiez la réponse du système contrôlé
Vérifiez la réponse du sous-marin contrôlé à la même perturbation.
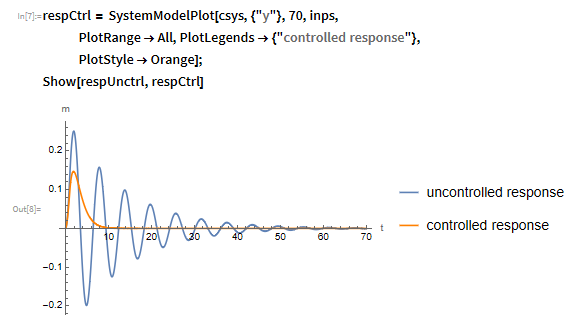
Le contrôleur stabilise le sous-marin en 10 secondes environ.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »