潜水艦のホバリング制御
ホバリング制御は水中機の操作性の助けとなります.この例では,外乱を除去し潜水艦の安定性を向上させる制御器を作る方法を示します.
モデルの作成
潜水艦とその環境のモデルをグラフィックスまたはプログラムを使って作成します.
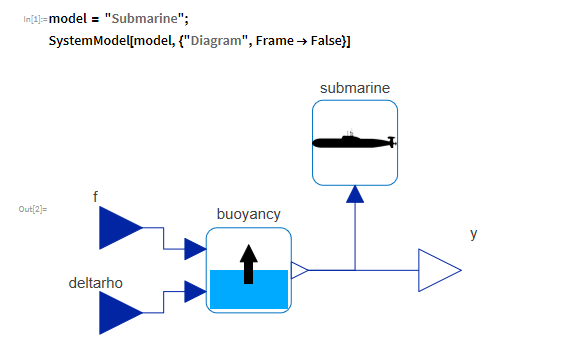
潜水艦は密度を変えることでホバリング深度を調整する.密度は潜水艦のバラストタンクに貯蔵されている水の量を調整することで変更する.
制御されていないシステムの応答をチェックする
制御されていない潜水艦のインパルス状の外乱に対する応答をチェックします.
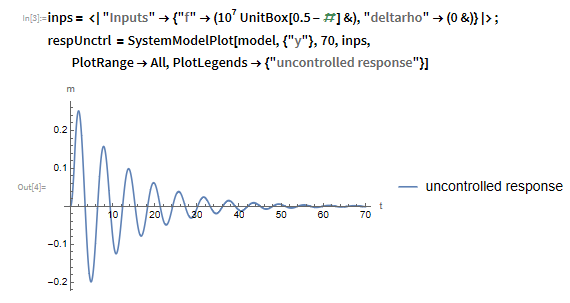
潜水艦は平衡位置の付近で振動し,約1分で落ち着く.
制御器の設計
応答の固有値が安定し十分に減衰するように選択して,潜水艦の振動を減衰させる制御器を設計します.
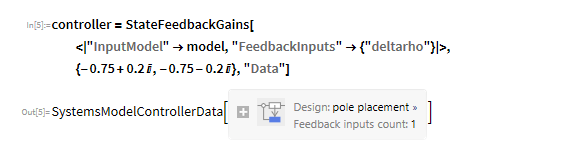
システムを安定させるために閉ループ極を置く.
制御器の接続
制御器を閉ループのモデルに自動的に接続することによって制御されたシステムを作成します.
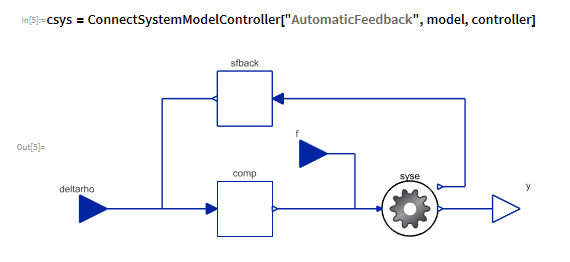
潜水艦システムは自動的に制御器に接続される.
制御されたシステムの応答をチェックする
制御された潜水艦の同じ外乱に対する応答をチェックします.
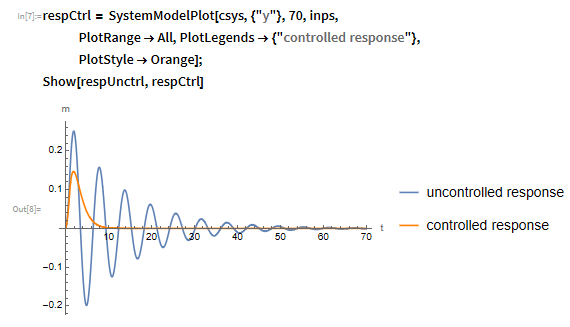
制御器は約10秒で潜水艦を安定させる.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »