Autre
Utilisez des exemples provenant d’un large éventail de domaines d’application pour apprendre la modélisation et la simulation avec System Modeler et le langage Modelica.


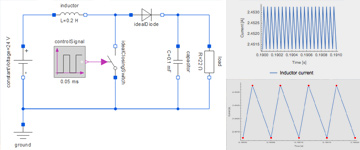
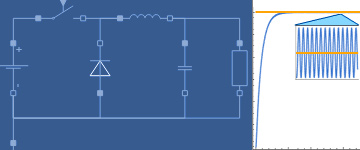
Convertisseur Boost
Les convertisseurs Boost sont utilisés pour augmenter la tension d’un niveau inférieur à un niveau supérieur. On trouve des convertisseurs Boost dans les véhicules électriques pour augmenter la tension d’une pile de batteries vers le moteur et dans les lampes LED pour augmenter la tension d’une cellule de batterie vers la diode lumineuse.

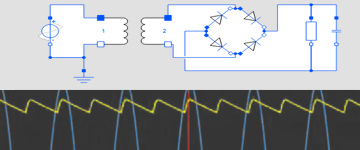
Convertisseur Buck–Boost
Les convertisseurs Buck–Boost sont utilisés à la fois pour augmenter la tension d’un niveau inférieur à un niveau supérieur et pour diminuer la tension d’un niveau supérieur à un niveau inférieur. Les convertisseurs Buck–Boost sont utilisés dans les applications où la tension d’alimentation varie dans le temps, telles que les applications alimentées par batterie.
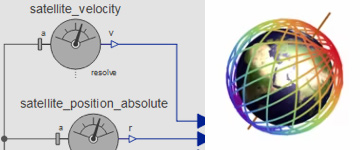
Contrôle de la trajectoire d’un satellite : co-simulation à l’aide des FMU
Importez des modèles autonomes à partir d’autres outils compatibles avec les FMI et exécutez-les en mode synchrone avec vos modèles. Cet exemple modélise un satellite avec une combinaison de mécanique 3D et de logique de contrôle basée sur des blocs.
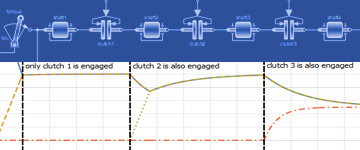
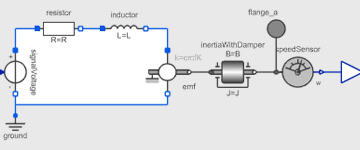
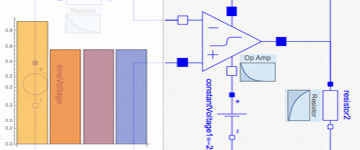
Contrôle de la vitesse d’un moteur à courant continu
Les mécanismes de contrôle de la vitesse ont un large éventail d’applications, allant de la supervision du mouvement des ascenseurs à la direction d’un véhicule autonome. Cet exemple montre comment créer un contrôleur de vitesse pour un moteur à courant continu.
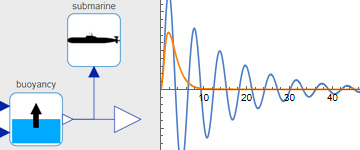
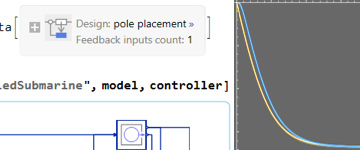
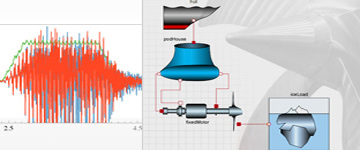
Contrôle de la profondeur d’un sous-marin
Être capable de naviguer rapidement d’une profondeur à l’autre est une exigence opérationnelle pour un sous-marin. Pour les opérations de furtivité, il est important qu’il n’y ait pas d’oscillations pendant ce mouvement. L’exemple suivant montre comment concevoir un contrôleur pour de telles applications.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »