衛星軌道の制御:FMUを使ったコシミュレーション
他のFMI準拠ツールからスタンドアロンのモデルをインポートして,同期モードで自分のモデルと一緒に実行することができます.この例では,3D力学とブロックベースの制御論理を組み合せて人工衛星をモデル化します.人工衛星は打上げシーケンスに従って地表から打ち上げられます.その後,制御ロジックFMUがスラスタを介して高度と速度を調整します.
モデル
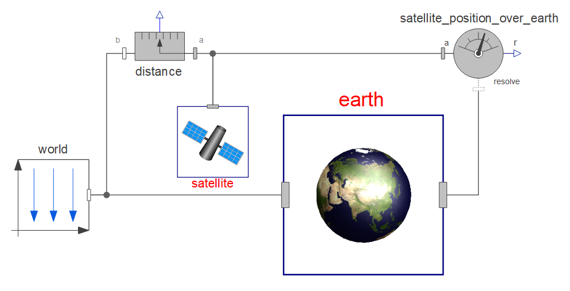
衛星軌道制御モデルは,地球と衛星のサブシステムから構成されます.地球は一定の回転を持つ質量としてモデル化され,衛星はそれに作用する推進力を持つ質量としてモデル化されます.
コシミュレーションのためにFMUをインポートする
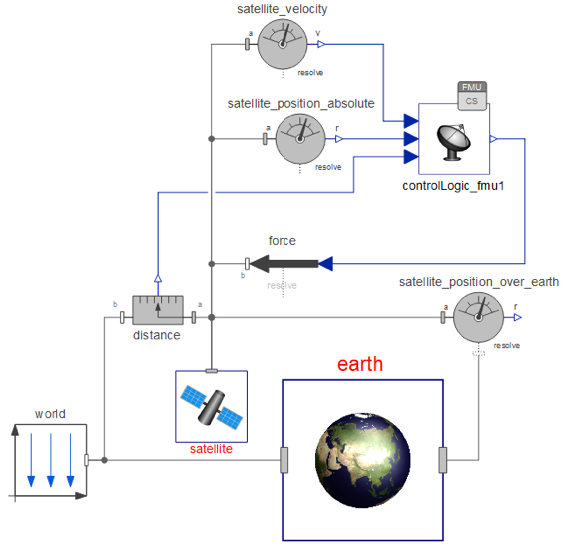
任意のFMI準拠のツールで設計された制御ロジックFMUがインポートされます.これは,衛星の移動中の瞬間的なエネルギー消費を最小限に抑えるように調整されています.FMUは2つの比例微分(PD)コントローラを使用してモデル化されます.
FMUのインポート
FMIのコシミュレーションインポートを使って,任意のFMI準拠のツールで設計されたモデルをインポートします.
衛星軌道を調べる
3Dグラフィックス,テクスチャ,パラメトリックプロットを使って,地球を回る衛星の軌道を視覚化します.高度コントローラがある場合とない場合の軌道を比較します.コントローラのない衛星は一定の高度を維持できないため,不均一な軌跡を辿ります.
衛星軌道を分析する
Wolfram言語を使ったカスタムの可視化機能によって,衛星軌道を可視化します.
Wolfram System Modeler
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »