Double Pendulum
| In[7]:= |  X |
| In[8]:= |  X |
Play Animation » Stop Animation »  |
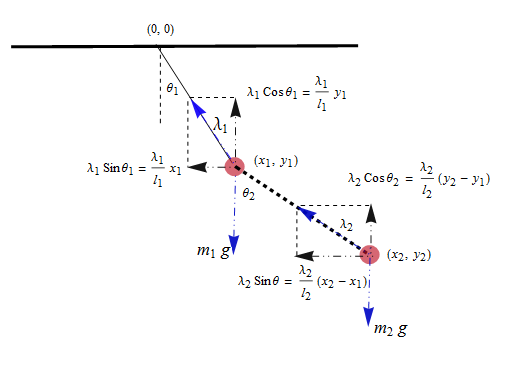
Model the motion of a double pendulum in Cartesian coordinates.
 X |
Derive the governing equations using Newton's second law of motion,  and
and  .
.
| In[1]:= | 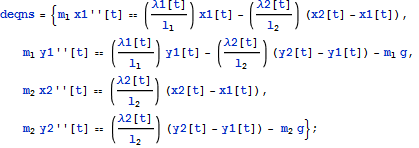 X |
The lengths of the pendulum rods are fixed. These are expressed as algebraic constraints.
| In[2]:= | X |
Specify the initial state of the system as initial conditions.
| In[3]:= | X |
Specify the physical parameters for the pendulum system.
| In[4]:= | X |
Solve and visualize the system.
| In[5]:= |  X |
| In[6]:= |  X |
| Out[6]= | 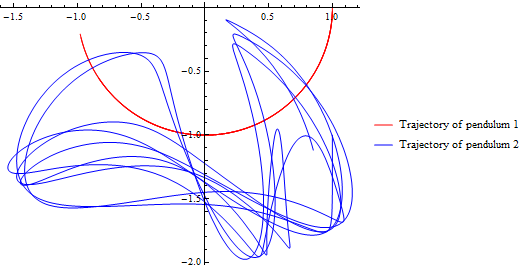 |