Bola y barra: Implementación de controlador en hardware
Implemente el modelo en V para el diseño, implementación y prueba de sistemas de control. Modele su sistema en System Modeler, y diseñe un controlador en Wolfram Language. Utilice el Kit de microcontroladores para generar código automatizado e implementarlo en un microcontrolador. Posteriormente, valide su modelo independiente con los objetivos de control. Este ejemplo muestra cómo diseñar, implementar y probar un controlador PID para equilibrar una bola sobre una barra.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
El modelo
El mecanismo de bola y barra se modela en System Modeler para obtener una representación linealizada de espacio de estados de la relación entre la posición de la bola y el ángulo de la barra. Más adelante, esta relación se utiliza para autoajustar los parámetros del controlador PID en Wolfram Language.
Modele el sistema en System Modeler
Modele el mecanismo de bola y barra.
Modele el mecanismo de bola y barra.
Calibre los componentes
Se calibran los diversos componentes de hardware y se obtiene su función de transferencia. Posteriormente, estas funciones de transferencia se conectan, y se diseña un modelo de retroalimentación con el controlador PID.
Calibre sus componentes
Use la biblioteca ModelPlug para calibrar el servo, el sensor IR y los potenciómetros.
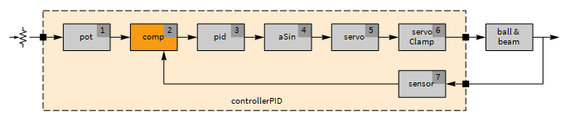
Representación esquemática del controlador PID y los componentes de hardware relacionados.
Implemente en hardware
Defina la configuración específica de su máquina para comunicarse con la placa Arduino UNO y configure la biblioteca de servos y las conexiones a los pines del Arduino. Finalmente, defina un período de muestreo e implemente el controlador en la placa Arduino UNO.
Implemente el controlador en hardware en Wolfram Language
Use el kit de microcontroladores para implementar el controlador en hardware.
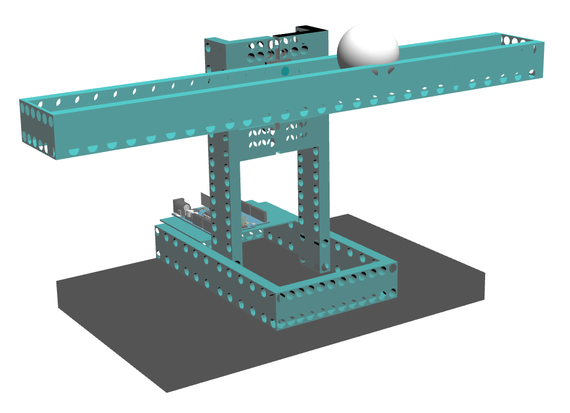
Modelo de bola y barra en acción.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »