Génie électrique
Utilisez System Modeler pour construire et étudier des circuits électriques, de l’électronique de puissance et des machines électriques. Combinez des composants électriques et mécaniques pour construire des modèles de systèmes complets. Effectuez des tâches d’analyse et mesurez les performances.
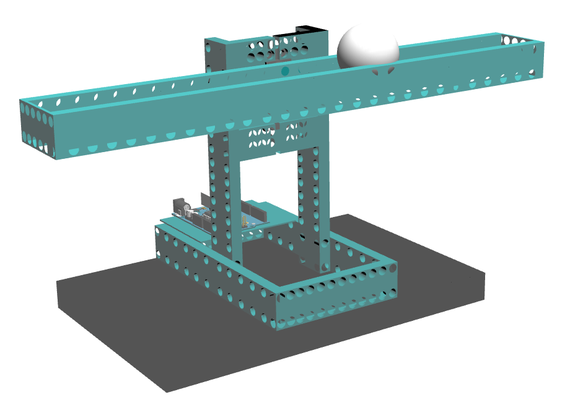
Balle et poutre : déploiement du contrôleur sur le matériel
Pour exécuter cet exemple, il vous faut
les dernières versions de System Modeler et Mathematica.
Veuillez choisir :
Obtenirun essai gratuit Continuer
le téléchargement
Le modèle
L’agencement de la balle et de la poutre est modélisé dans System Modeler pour obtenir une représentation linéarisée de l’espace d’état de la relation entre la position de la balle et l’angle de la poutre. Cette relation est ensuite utilisée pour régler automatiquement les paramètres du régulateur PID dans Wolfram Language.
Modélisez le système dans System Modeler
Modélisez l’agencement de la balle et de la poutre.
Calibrez les composantes
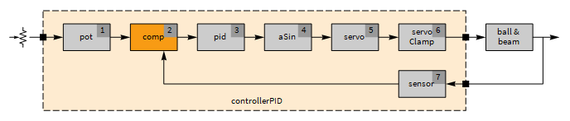
Les différentes composantes matérielles sont calibrées et on obtient leur fonction de transfert. Ensuite, ces fonctions de transfert sont connectées et la conception d’un modèle de rétroaction avec le régulateur PID est réalisée.
Calibrez vos composantes
Utilisez la bibliothèque ModelPlug pour calibrer le servo, le capteur IR et les potentiomètres.
Déployez dans le matériel
Définissez les paramètres spécifiques à votre machine pour communiquer avec la carte Arduino UNO et configurez la bibliothèque de servos et les connexions aux broches de l’Arduino. Pour finir, définissez une période d’échantillonnage et déployez le contrôleur sur la carte Arduino UNO.
Déployez un contrôleur dans le matériel avec Wolfram Language
Utilisez le kit de microcontrôleur pour déployer le contrôleur dans le matériel.
Wolfram System Modeler
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »