Evaluación de la robustez de un estimador de estado de temperatura
Este modelo analiza la robustez de un estimador de estado, tomando mediciones de un radiador eléctrico. El estimador de estado combina diferentes mediciones y un modelo del sistema para estimar la temperatura actual del radiador. Para evaluar la robustez, se añade ruido utilizando bloques de la biblioteca Modelica.Noise.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
El modelo
El modelo contiene un pequeño radiador eléctrico alimentado por una fuente de voltaje de 24V. El elemento calefactor calienta el cuerpo del radiador. La temperatura del radiador también se verá afectada por la temperatura ambiente, la cual aumentará durante la simulación. Se toman tres mediciones de forma continua: el voltaje del radiador, la temperatura ambiente y una medición directa de la temperatura del radiador. Usando la biblioteca Noise, se añade ruido blanco a cada una de estas mediciones. Todas las mediciones ruidosas se introducen en un filtro de Kalman que estima la temperatura del radiador.
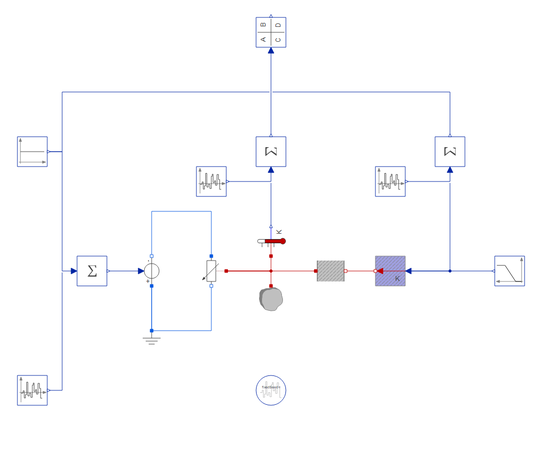
En la parte superior del diagrama se encuentra el estimador de estado, el cual estima la temperatura del condensador térmico ubicado en el centro.
¡Nueva biblioteca!
La nueva biblioteca Noise incorporada añade realismo al agregar ruido a las simulaciones.
El estimador con filtro de Kalman fue creado linealizando el modelo sin ruido, usando la función WSMLinearize. Luego, se utilizó la conjunto incorporado de funciones de procesamiento de señales de Wolfram Language.
Distribuciones de ruido
El valor esperado y la desviación estándar de las distribuciones de ruido pueden modificarse en el modelo. El filtro de Kalman fue creado suponiendo que los valores estándar definidos para las distribuciones de ruido en el modelo son correctos. Al aumentar el nivel de ruido u otros parámetros del modelo, podemos observar cuán robusto es el filtro frente a errores de modelado.
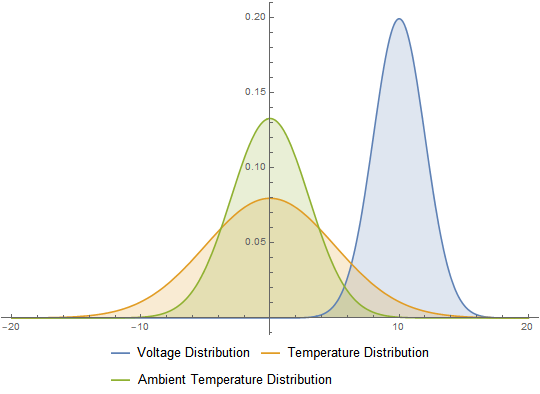
Distribuciones de ruido para las diferentes mediciones, representadas usando Wolfram Language.
Visualice en Wolfram Language
Las funciones incorporadas de Wolfram Language permiten crear rápidamente representaciones gráficas de densidad de probabilidad.
Al simular el modelo, podemos comparar qué tan bien se corresponde la temperatura estimada con la temperatura real. El estimador es dinámico y se actualiza a medida que se introducen más datos de medición en el filtro. Esto hace que el estimador converja hacia el estado verdadero.

La medición directa de la temperatura en el radiador es muy ruidosa.
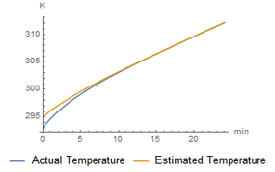
Con un estimador de estado, podemos estimar la temperatura con precisión.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »