Péndulo invertido: Linealización de modelos simbólicos
La linealización permite utilizar herramientas para sistemas lineales para estudiar sistemas no lineales alrededor de un punto de operación. En este ejemplo se linealiza un péndulo invertido alrededor de su posición vertical. El objetivo es analizar el comportamiento del sistema del péndulo invertido controlado para distintas longitudes del péndulo.
El modelo
En este ejemplo, se emplea un controlador PID para mantener el péndulo en su posición vertical. El punto de pivote del péndulo está montado sobre un carro que puede moverse horizontalmente, controlado por un motor y un sistema de engranajes.
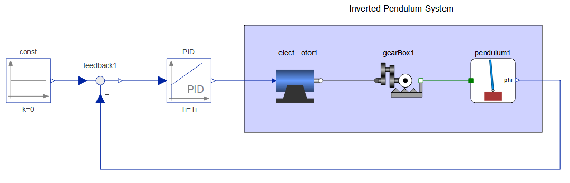
Modelo del sistema de control.
Diseño de control
El sistema de péndulo invertido se linealiza alrededor de su posición vertical, y la longitud del péndulo se mantiene en forma simbólica. A continuación, se diseña el sistema de control ajustando los parámetros del PID para distintas longitudes del péndulo.
Novedades en System Modeler 12.0
Obtenga linealización simbólica con sus parámetros simbólicos seleccionados.
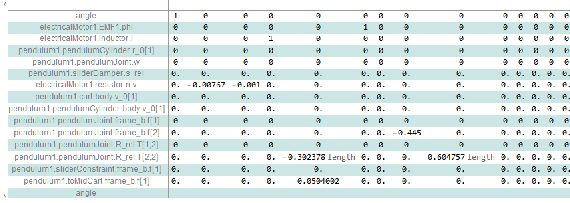
Representación en espacio de estados linealizada con la longitud del péndulo como parámetro simbólico.
Se verifica la estabilidad del sistema combinado que consta del controlador PID y el péndulo invertido utilizando el diagrama de Nyquist. La función de transferencia en bucle abierto del sistema combinado tiene un polo inestable y un rodeo en sentido antihorario alrededor de {-1,0}. Ya que el polo inestable y el rodeo se cancelan, se puede inferir que el sistema en bucle cerrado no tendrá polos inestables.
Verifique la estabilidad
Use la representación de Nyquist para verificar polos inestables del sistema de bucle cerrado.
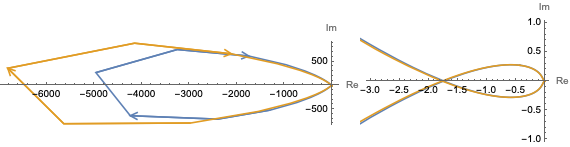
Representación de Nyquist para distintas longitudes.
El modelo se simula después de verificar la estabilidad. Ahora se pueden observar los datos en bruto de las oscilaciones y representar la envolvente de la respuesta. Se puede ver que, a medida que aumenta la longitud, el tiempo para alcanzar el estado estacionario aumenta.
Implemente el controlador
Observe el comportamiento del sistema para distintas longitudes.
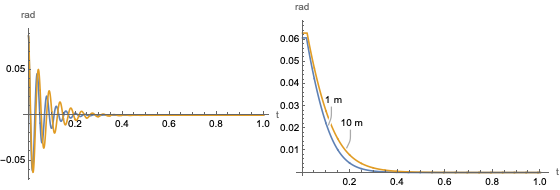
Respuesta del sistema para un ángulo de péndulo inicial de 5°.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »