Rueda con fricción seca
Aunque los vehículos con ruedas han sido un medio de transporte importante durante más de 5000 años, el comportamiento dinámico de las interacciones rueda-superficie sigue siendo bastante difícil de comprender. En este ejemplo, estudiaremos cómo se comporta una rueda modelada con fricción seca cuando gira alrededor de un poste impulsada por un torque constante.
Para ejecutar este ejemplo necesitará
Las versiones más recientes de System Modeler y Mathematica.
Por favor haga una selección:
Obtener unaprueba gratuita Continuar
con la descarga
El modelo
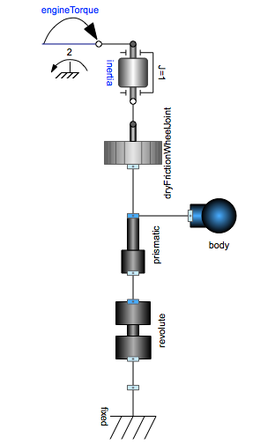
Un banco de pruebas virtual para la rueda. Todos los componentes del modelo están disponibles en la biblioteca PlanarMechanics y en las bibliotecas incorporadas.
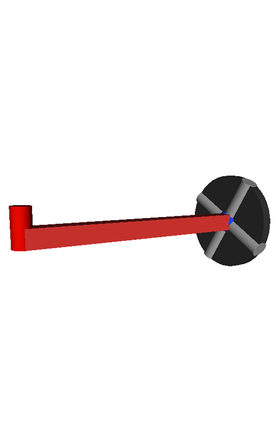
Vista 3D generada del banco de pruebas.
Resultados de la simulación
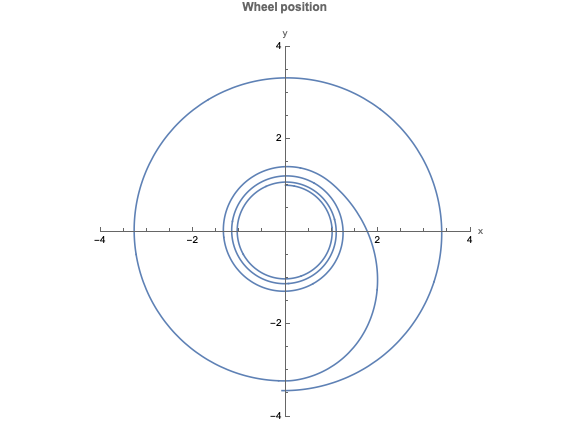
A medida que la rueda comienza a acelerar, la distancia desde el centro aumentará debido al deslizamiento lateral. Inicialmente, este deslizamiento es pequeño y la rueda se mueve en un círculo casi ideal. Sin embargo, a medida que la velocidad de deslizamiento aumenta como resultado de una mayor fuerza centrífuga, la rueda empieza a deslizarse.

El deslizamiento de la rueda puede entenderse al estudiar la fuerza de fricción sobre la rueda como una función de la velocidad de deslizamiento. Nótese que, cuando la velocidad de deslizamiento alcanza cierto punto, la fuerza de la fricción disminuye, comienza el deslizamiento y la distancia de la rueda al centro aumenta rápidamente. Luego, una vez que la distancia sea lo suficientemente grande y la fuerza centrífuga se haya vuelto menor que la fuerza de fricción, la velocidad de deslizamiento disminuye, y la rueda vuelve a moverse en un círculo.
Wolfram System Modeler
Probar
Comprar
System Modeler está disponible en inglés
y japonés
para Windows, macOS y Linux »
¿Preguntas? ¿Comentarios? Contacte a un experto de Wolfram »