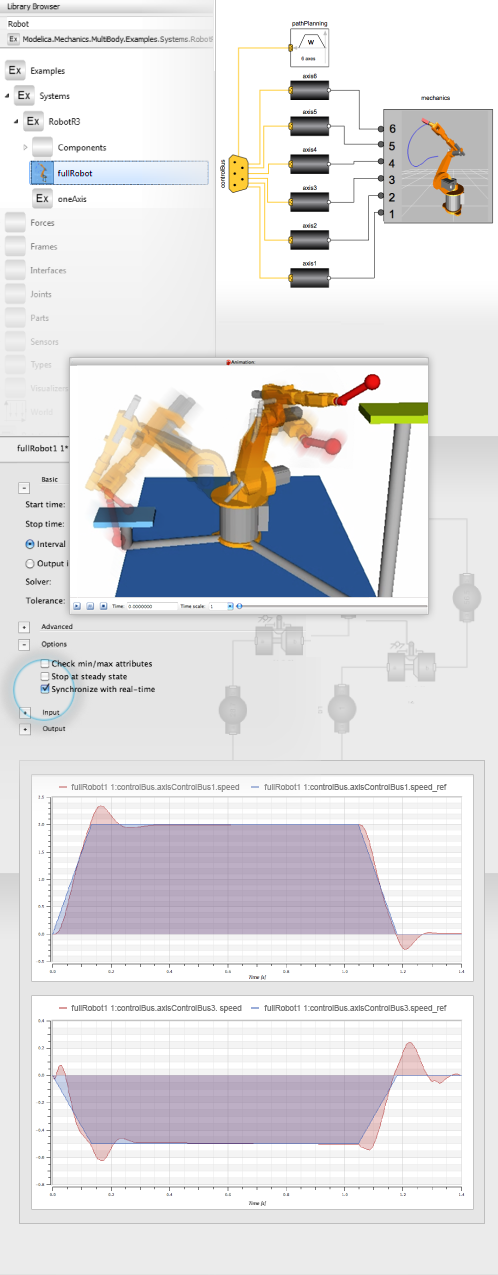
Signaux de référence et de mesure pour deux des six axes du robot.
Modélisez de nouveaux processus de fabrication avant leur mise en œuvre ou des processus existants afin de diagnostiquer les problèmes. Utilisez Mathematica pour les analyses, y compris le prétraitement et le post-traitement des modèles, des simulations et des résultats.
Pour exécuter cet exemple, il vous faut
Veuillez choisir :
ObtenirUtilisez des modèles intégrés
Accédez aux modèles des exemples intégrés à étudier et à utiliser comme blocs de construction.
Simulation en temps réel
Exécutez la simulation à la même vitesse que le robot physique.
Animation 3D automatique
Cette animation est créée automatiquement en fonction de la disposition du modèle.
Planification de la trajectoire
Comparez la manière dont les trajectoires réelles correspondent aux trajectoires prévues du robot.
Essayez
Achetez
System Modeler est disponible en anglais
et en japonais
sur Windows, macOS et Linux »
Vous avez des questions ou des commentaires ? Contactez un expert Wolfram »