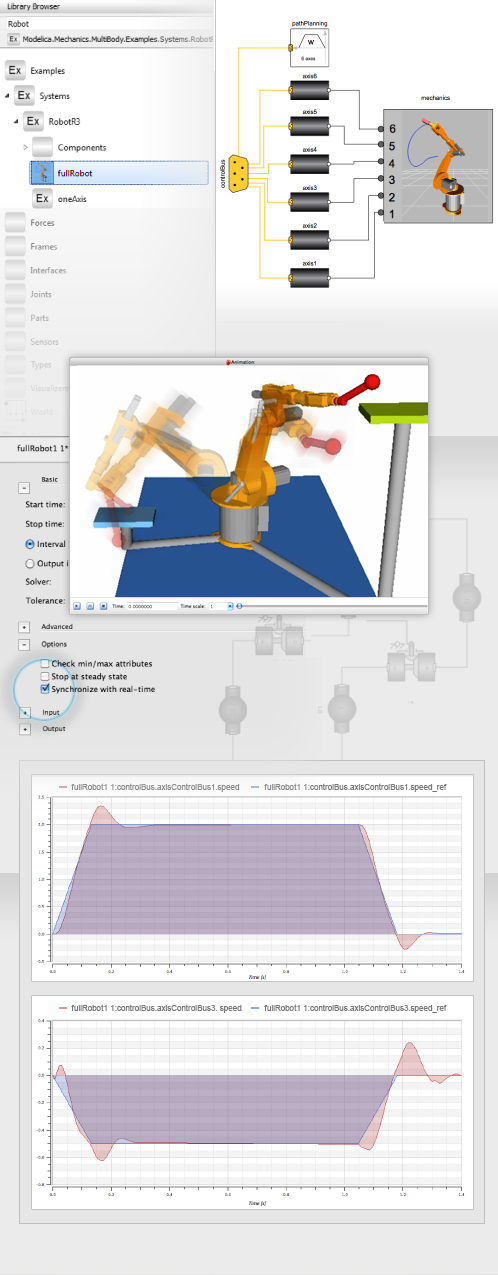
Reference and measurement signals for two of the robot's six axes
実装前に新しい製造過程をモデル化したり,既存の製造過程をモデル化したりして問題を診断します.Mathematicaを使うと,モデルの前処理・後処理,シミュレーション,結果等の解析が可能です.
Use Built-in Models
Access the built-in example models to study and use as building blocks.
Real-Time Simulation
Run the simulation at the same speed as the physical robot.
Automatic 3D Animation
This animation is automatically created based on the model's layout.
Path Planning
Compare how the actual paths correspond to the planned paths of the robot.
評価版
ご購入
System ModelerはWindows,macOS,
Linuxで
日本語と英語でご利用になれます »
ご質問やコメントはWolframエキスパートまでお寄せください »